

DC bezkalátorový motorKonstrukce struktury je velmi rozumná, z jeho použití můžeme jasně cítit jeho použití, výhody přiměřené struktury se snadno použijí, rychlý provoz, můžeme vidět, jak vysoké ekonomické výhody a využívání výhod přiměřené struktury. Jaká je jeho struktura?
Nejprve se podívejte na její strukturu:
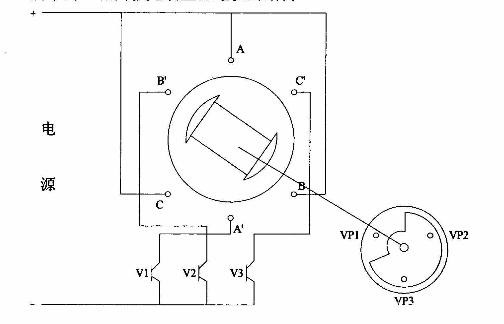
1. A, B a C jsou třífázová vinutí statoru, která jsou v elektronickém přepínači spojena se zařízeními V1, V2 a V3. Sledovací rotor snímače polohy je umístěn na rotoru motoru.VP1, VP2 a VP3 jsou rovnoměrně distribuovány na jednom konci kartáčovaného stejnosměrného motoru s rozdílem 120 stupňů. Podle určitého fotoelektrického zařízení jsou ozářeny světlem nebo ne prostřednictvím funkce rotující závěrky na rotující hřídeli motoru.
2, vinutí statoru běžného elektrického, elektrického proudu a hlavního magnetického pole produkované permanentními magnety na rotoru vyplývající z interakce mezi elektromagnetickým točivým momentem a rotací rotoru, polohou magnetu rotoru se snímačem polohy do elektrických signálů,, na elektrické signály,, na elektrické signály,, na elektrické signály. a poté ovládejte elektronický přepínací obvod tak, aby každé fázové vinutí statoru zase vedení, fázový proud statoru spolu se změnou polohy rotoru v určitém pořadí Komutace. Vedení sekvence elektronického přepínacího obvodu může být synchronizována s úhlem rotace rotoru, aby se dosáhlo mechanického zvracení.
Protože struktura motoru bezkartáčových dc je nastavena přiměřeně, takže je velmi dobré, v procesu provozu motoru, kromě porozumění jeho struktuře, musíme také udělat, aby jeho reverzní efekt byl ideálnějším, a ty jsou, a to jsou, a to jsou V podstatě postaveno na základě rozumné struktury.

Čas příspěvku: března-28-2020



