

V tomto projektu ukážeme, jak postavit aVibrační motorobvod.
AMotor vibrátoru DC 3.0Vje motor, který vibruje při dostatečném výkonu. Je to motor, který se doslova třese. Je to velmi dobré pro vibrační objekty. Může být použit v řadě zařízení pro velmi praktické účely. Například jedna z nejběžnějších položek, které vibrují, jsou mobilní telefony, které vibrují, když jsou volány, když jsou umístěny ve vibračním režimu. Mobilní telefon je takovým příkladem elektronického zařízení, které obsahuje vibrační motor. Dalším příkladem může být Rumble Pack herního ovladače, který se třese a napodobuje akce hry. Jeden řadič, kde lze přidat balíček Rumble jako příslušenství, je Nintendo 64, který přišel s balíčky Rumble, aby ovladač vibroval, aby napodoboval herní akce. Třetím příkladem by mohla být hračka, jako je Furby, která vibruje, když uživatel provádí akce, jako je tření nebo stisknutí atd.
Takvibrace minima magnetu DCMotorové obvody mají velmi užitečné a praktické aplikace, které mohou sloužit nesčetným použití.
Způsobit vibrační vibraci vibrací je velmi jednoduchý. Jediné, co musíme udělat, je přidat potřebné napětí do 2 terminálů. Vibrační motor má 2 terminály, obvykle červený vodič a modrý drát. Polarita nezáleží na motorech.
Pro náš vibrační motor budeme používat vibrační motor Precision Microdrives. Tento motor má rozsah provozního napětí 2,5-3,8 V, který má být napájen.
Pokud tedy připojíme 3 volty přes jeho terminál, bude vibrovat opravdu dobře, jak je uvedeno níže:
To je vše, co je potřebné k tomu, aby vibrační motor vibroval. 3 volty mohou být poskytovány 2 bateriemi AA v sérii.
Chceme však posunout vibrační motorový obvod na pokročilejší úroveň a nechat jej ovládat mikrokontrolérem, jako je napříkladArduino.
Tímto způsobem můžeme mít více dynamičtější kontroly nad vibračním motorem a můžeme jej způsobit vibraci v nastavených intervalech, pokud chceme nebo pouze v případě určité události.
Ukážeme, jak integrovat tento motor s Arduino, aby se vytvořil tento typ ovládání.
Konkrétně v tomto projektu postavíme obvod a naprogramujeme jej tak, abyVibrační motor12mm vibruje každou minutu.
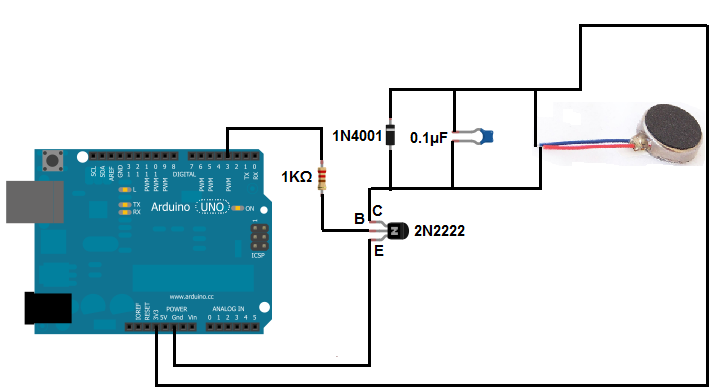
Vibrační motorový obvod, který vytvoříme, je uvedeno níže:
Schematický diagram pro tento obvod je:
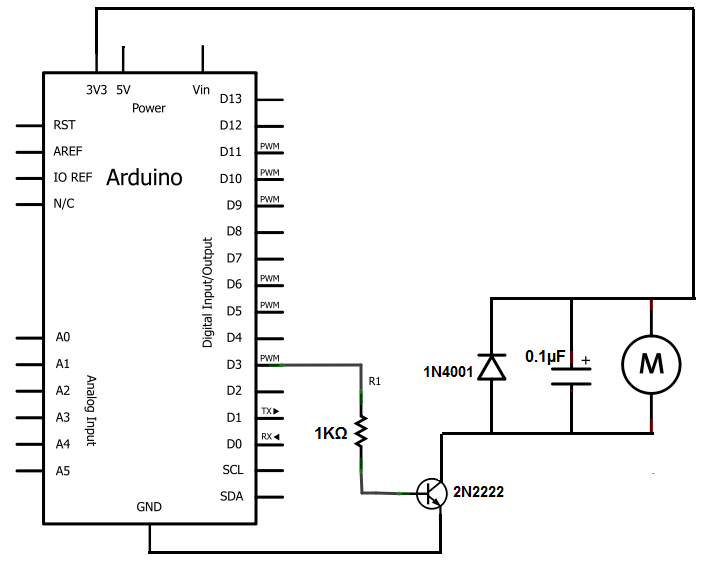
Při řízení motoru s mikrokontrolérem, jako je Arduino, je důležité připojit diodovou reverzní zkreslenou paralelně s motorem. To platí také při řízení pomocí motorového ovladače nebo tranzistoru. Dioda působí jako chránič přepětí proti hrotkám napětí, které může motor produkovat. Vinutí motoru notoricky produkují hroty napětí, když se otáčí. Bez diody by tato napětí mohla snadno zničit váš mikrokontrolér nebo motorový ovladač IC nebo zapnout tranzistor. Při jednoduchém napájení vibračního motoru přímo napětím DC není nutná žádná dioda, a proto v jednoduchém obvodu, který máme výše, používáme pouze zdroj napětí.
Kondenzátor 0,1µF absorbuje napěťové hroty produkované, když kartáče, které jsou kontakty spojujícími elektrický proud s vinutím motoru, se otevírají a zavírají.
Důvod, proč používáme tranzistor (2N2222), je ten, že většina mikrokontrolérů má relativně slabé proudové výstupy, což znamená, že nevystupují dostatek proudu, aby řídili mnoho různých typů elektronických zařízení. Abychom vytvořili tento slabý proudový výstup, použijeme tranzistor k zajištění aktuálního zesílení. Toto je účel tohoto tranzistoru 2N2222, který zde používáme. Vibrační motor potřebuje přibližně 75 mA proudu. Tranzistor to umožňuje a my můžeme řídit3V motor typu mincí 1027. Abychom se ujistili, že příliš mnoho proudu neprotéká z výstupu tranzistoru, umístíme 1KΩ do série se základnou tranzistoru. To utlumí proud na přiměřenou částku, aby příliš mnoho proudu neposilovalo8 mm mini vibrační motor. Nezapomeňte, že tranzistory obvykle poskytují asi 100násobek zesílení základního proudu, který vstupuje. Pokud neumístíme rezistor na základnu nebo na výstup, může být příliš mnoho proudu poškozující motor. Hodnota rezistoru 1KΩ není přesná. Jakákoli hodnota může být použita až asi 5 kΩ.
Připojíme výstup, který tranzistor bude řídit ke kolektoru tranzistoru. Toto je motor i všechny komponenty, které potřebuje souběžně s ním pro ochranu elektronických obvodů.
Čas příspěvku: říjen-12-2018



