

G er en enhed, der ofte bruges til at beskrive vibrationsamplituden ivibrationsmotorerog lineære resonante aktuatorer. Det repræsenterer accelerationen på grund af tyngdekraften, som er ca. 9,8 meter per sekund kvadratisk (m/s²).
Når vi siger et vibrationsniveau på 1G, betyder det, at vibrationsamplituden svarer til den acceleration, som en objekt oplever på grund af tyngdekraften. Denne sammenligning giver os mulighed for at forstå intensiteten af vibrationen og dens potentielle indflydelse på det aktuelle system eller anvendelse.
Det er vigtigt at bemærke, at G bare er en måde at udtrykke vibrationens amplitude på, det kan også måles i andre enheder, såsom meter pr. Sekund, der de specifikke krav eller standard. Ikke desto mindre giver brug af G som en enhed et klart referencepunkt og hjælper kunderne med at forstå vibrationsniveauer på en relevant måde.
Hvad er grunden til ikke at bruge forskydning (mm) eller kraft (n) som et mål for vibrationsamplitude?
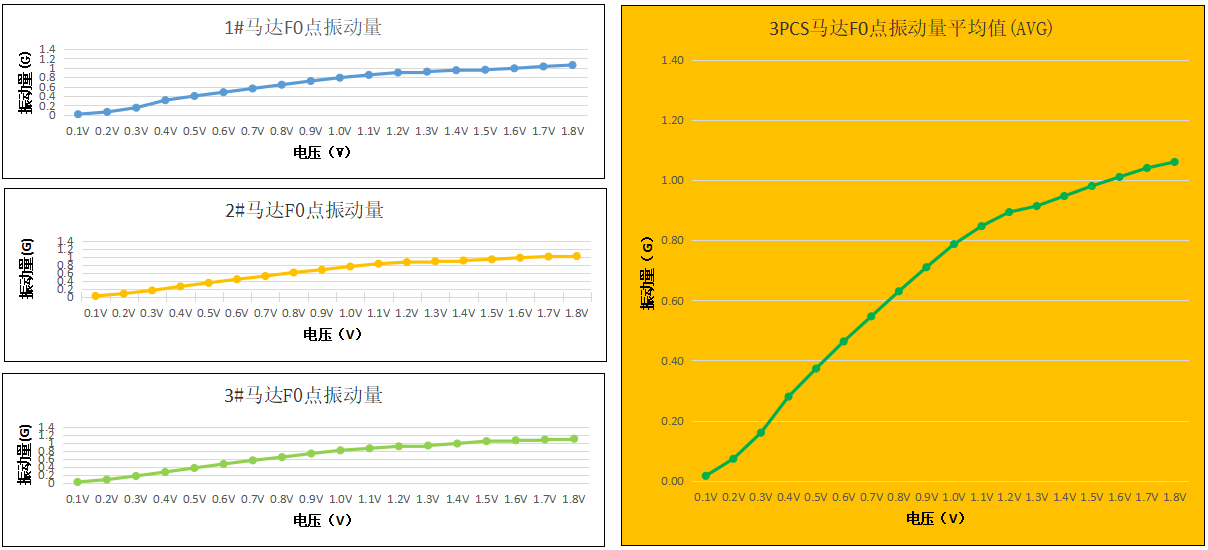
Vibrationsmotorerbruges typisk ikke alene. De indarbejdes ofte i større systemer sammen med målmasser. For at måle vibrationsamplitude monterer vi motoren på en kendt målmasse og bruger et accelerometer til at indsamle dataene. Dette giver os et klarere billede af systemets samlede vibrationsegenskaber, som vi derefter illustrerer i et typisk præstationsegenskabsdiagram.
Kraften, der udøves af vibrationsmotoren, bestemmes af følgende ligning:
$$ f = m \ gange r \ gange \ omega ^{2} $$
(F) Repræsenterer kraften, (m) repræsenterer massen af den excentriske masse på motoren (uanset hele systemet), (r) repræsenterer excentriciteten af den excentriske masse og (ω) repræsenterer frekvensen.
Det skal bemærkes, at kun motorens vibrationskraft ignorerer målmassens indflydelse. For eksempel kræver et tungere objekt større kraft til at producere det samme niveau af acceleration som et mindre og lettere objekt. Så hvis to objekter bruger den samme motor, vil det tungere objekt vibrere til en meget mindre amplitude, selvom motorer producerer den samme kraft.
Et andet aspekt af motoren er vibrationsfrekvensen:
$$ f = \ frac {Motor \: hastighed \ :( RPM)} {60} $$
Fortrængningen forårsaget af vibrationer påvirkes direkte af hyppigheden af vibration. I en vibrerende enhed kræfter kræfter cyklisk på systemet. For hver udøvet kraft er der en lige og modsat kraft, der til sidst annullerer den. Når vibrationsfrekvensen er højere, falder tiden mellem forekomsten af modstridende kræfter.
Derfor har systemet mindre tid til at blive forskudt, før modsatte kræfter annullerer det. Derudover vil et tungere objekt have en mindre forskydning end et lettere objekt, når den udsættes for den samme kraft. Dette svarer til den tidligere nævnte effekt med hensyn til kraft. Et tungere objekt kræver mere kraft for at opnå den samme forskydning som et lettere objekt.
Kontakt os
Vores team kan yde støtte og hjælp tilElektrisk vibrationsmotorprodukter. Vi forstår, at forståelse, specificering, validering og integration af motorprodukter i slutapplikationer kan være kompleks. Vi har viden og ekspertise til at reducere de risici, der er forbundet med motorisk design, fremstilling og forsyning. Kontakt vores team i dag for at diskutere dine motorrelaterede behov og finde en løsning, der passer til dine specifikke krav. Vi er her for at hjælpe.
Konsulter dine ledereksperter
Vi hjælper dig med at undgå faldgruber med at levere kvaliteten og værdsætte dit mikro børsteløse motoriske behov, til tiden og på budgettet.
Posttid: Nov-17-2023



