

G estas unuo ofte uzata por priskribi la amplekson de vibro enVibraj Motorojkaj linearaj resonaj aktoroj. Ĝi reprezentas la akcelon pro gravito, kiu estas proksimume 9,8 metroj por dua kvadrato (M/s²).
Kiam ni diras vibran nivelon de 1g, tio signifas, ke la vibra amplekso samvaloras al la akcelo, kiun objekto spertas pro gravito. Ĉi tiu komparo permesas al ni kompreni la intensecon de la vibro kaj ĝian eblan efikon sur la aktuala sistemo aŭ apliko.
Gravas rimarki, ke G estas nur maniero esprimi la amplekson de vibro, ĝi ankaŭ povas esti mezurita en aliaj unuoj kiel metroj por dua kvadrato (M/s²) aŭ milimetroj por dua kvadrato (mm/s²), depende de la specifaj postuloj aŭ normo. Tamen, uzi G kiel unuon provizas klaran referencan punkton kaj helpas klientojn kompreni vibrajn nivelojn en grava maniero.
Kio estas la kialo por ne uzi movon (mm) aŭ forton (n) kiel mezuron de vibra amplekso?
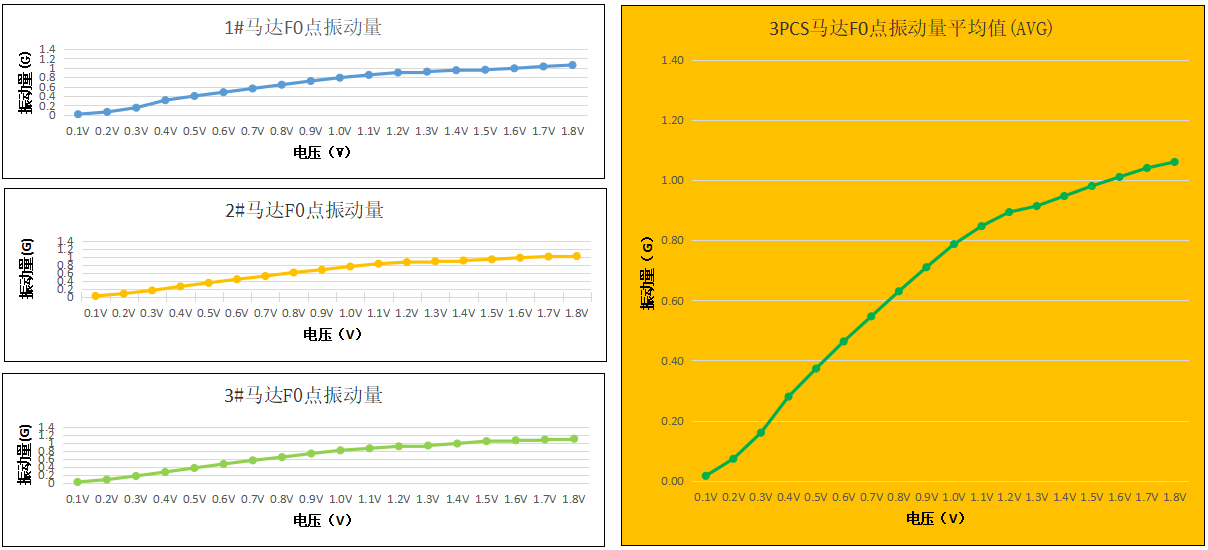
Vibraj Motorojestas kutime ne uzataj sole. Ili ofte estas enigitaj en pli grandajn sistemojn kune kun celaj masoj. Por mezuri vibran amplekson, ni muntas la motoron sur konatan celan mason kaj uzas akcelerometron por kolekti la datumojn. Ĉi tio donas al ni pli klaran bildon pri la ĝeneralaj vibraj trajtoj de la sistemo, kiujn ni tiam ilustras en tipa agada karakteriza diagramo.
La forto praktikata de la vibra motoro estas determinita per la sekva ekvacio:
$$ f = m \ Times r \ Times \ omega ^{2} $$
(F) reprezentas la forton, (m) reprezentas la mason de la ekscentra maso sur la motoro (sendepende de la tuta sistemo), (r) reprezentas la ekscentrecon de la ekscentra maso, kaj (Ω) reprezentas la frekvencon.
Oni devas rimarki, ke nur la vibra forto de la motoro ignoras la influon de la cela maso. Ekzemple, pli peza objekto postulas pli grandan forton produkti la saman nivelon de akcelo kiel pli malgranda kaj pli malpeza objekto. Do se du objektoj uzas la saman motoron, la plej peza objekto vibros al multe pli malgranda amplekso, kvankam la motoroj produktas la saman forton.
Alia aspekto de la motoro estas la vibra frekvenco:
$$ f = \ frac {motor \: rapido \ :( rpm)} {60} $$
La movo kaŭzita de vibro estas rekte trafita de la ofteco de vibro. En vibra aparato, Fortoj agas cikle sur la sistemo. Por ĉiu forto praktikata, ekzistas egala kaj kontraŭa forto, kiu eventuale nuligas ĝin. Kiam la ofteco de vibro estas pli alta, la tempo inter la okazo de kontraŭaj fortoj malpliiĝas.
Tial la sistemo havas malpli da tempo por esti delokita antaŭ ol kontraŭstaraj fortoj nuligas ĝin. Aldone, pli peza objekto havos pli malgrandan movon ol pli malpeza objekto kiam submetita al la sama forto. Ĉi tio similas al la efiko menciita antaŭe pri forto. Pli peza objekto postulas pli da forto por atingi la saman movon kiel pli malpeza objekto.
Kontaktu nin
Nia teamo povas doni subtenon kaj helpon kunElektra Vibra Motoroproduktoj. Ni komprenas, ke kompreni, specifi, validigi kaj integri motorajn produktojn en finajn aplikojn povas esti kompleksa. Ni havas la scion kaj kompetentecon por helpi redukti la riskojn asociitajn kun motora projektado, fabrikado kaj provizado. Kontaktu nian teamon hodiaŭ por diskuti viajn motor-rilatajn bezonojn kaj trovi solvon, kiu konvenas al viaj specifaj postuloj. Ni estas ĉi tie por helpi.
Konsultu viajn gvidajn spertulojn
Ni helpas vin eviti la envenojn por liveri la kvaliton kaj taksi vian mikro-senbridan motoron bezonon, ĝustatempe kaj buĝeti.
Afiŝotempo: Nov-17-2023



