

DC harjadeta mootorKonstruktsiooni disain on väga mõistlik, kuna selle kasutamisest saame selgelt tunda selle kasutamist, mõistliku struktuuri eeliseid on lihtne kasutada, kiiret tööd, näeme, kui kõrged majanduslikud eelised ja kasutavad mõistlikku struktuuri. Niisiis, mis on selle struktuur?
Esiteks vaadake selle ülesehitust:
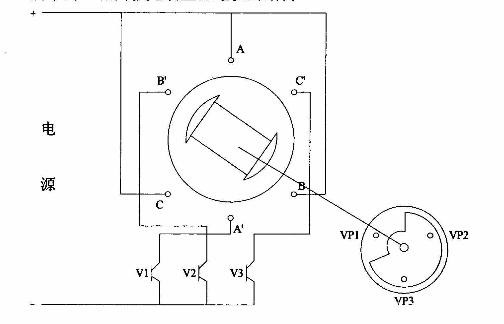
1. A, B ja C on kolmefaasilised staatori mähised, mis on elektroonilise lüliti vooluahelas ühendatud vastavalt toitelülitiseadmetega V1, V2 ja V3. Asendianduri jälgimisrootor asetatakse mootori rootorile.VP1, VP2 ja VP3 jagunevad harjadeta alalisvoolu mootori ühes otsas ühtlaselt 120 -kraadise erinevusega. Teatud fotoelektrilise seadme sõnul kiirgatakse neid valguse või mitte läbi pöörleva katiku funktsiooni mootori pöörleva võlli.
2, tavalise elektrivoolu ja peamise magnetvälja staatori mähis rootoril püsimagnetite abil, mis tuleneb elektromagnetilise pöördemomendi ja rootori pöörlemise vastastikmõjust, rootori magnetiratapi asendist positsioonianduriga elektrisignaalideks, elektrisignaalideks, ja seejärel kontrollige elektroonilise lüliti vooluahelat, nii et staatori iga faasi mähimine omakorda juhtivus, staatori faasivool koos rootori asendi muutumisega teatud järjekorras Kommutatsioon. Mehaanilise ümberpööramise efekti saavutamiseks saab elektroonilise lülitusskeemi juhtivuse järjestust sünkroonida rootori pöörlemisnurgaga.
Kuna harjadeta alalisvoolu mootori struktuur on mõistlikult üles seatud, on seda väga hea kasutada ka mootori toimimise protsessis, lisaks selle struktuuri mõistmisele, peame tegema ka selle ümberpööramise efekti ideaalsemaks ja need on ka Põhimõtteliselt ehitatud mõistliku struktuuri alusel.

Postiaeg: 28.-28-2020



