

DC -harjaton moottoriRakenteen suunnittelu on erittäin kohtuullista, sen käytöstä voimme selvästi tuntea sen käytön, kohtuullisen rakenteen edut on helppo käyttää, nopea toiminta, voimme nähdä, kuinka korkeat taloudelliset edut ja käyttävät etuja kohtuullinen rakenne. Joten mikä on sen rakenne?
Katso ensin sen rakenne:
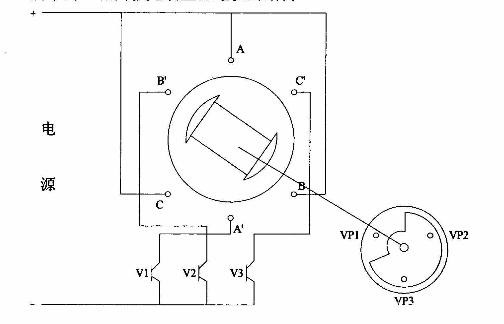
1. A, B ja C ovat kolmivaiheista staattorin käämiä, jotka on kytketty vastaavasti sähkökytkinlaitteisiin V1, V2 ja V3 elektronisessa kytkinpiirissä. Asentoanturin seuranta roottori asetetaan moottorin roottoriin.vp1, VP2 ja VP3 jakautuvat tasaisesti harjattoman tasavirtamoottorin toiseen päähän, jonka ero on 120 astetta. Tietyn valosähköisen laitteen mukaan ne säteilytetään valolla tai eivät moottorin pyörivän akselin pyörivän sulkimen toiminnan kautta.
2, yhteisen sähköisen, sähkövirran staattorin käämitys ja roottorin pysyvien magneettien tuottama päämagneettikentä ja hallitse sitten elektronista kytkinpiiriä siten, että staattorin jokainen vaihekainaus puolestaan johtaa staattorivaihevirta roottorin asennon muutoksen kanssa tietyssä järjestyksessä. Elektronisen kytkinpiirin johtavuussekvenssi voidaan synkronoida roottorin pyörimiskulman kanssa mekaanisen kääntämisvaikutuksen saavuttamiseksi.
Koska harjaton tasavirtamoottorin rakenne on asetettu kohtuudella, joten on erittäin hyvä käyttää moottorin käyttöprosessissa sen rakenteen ymmärtämisen lisäksi, meidän on myös tehtävä sen kääntävä vaikutus ihanteellisempi, ja nämä ovat Periaatteessa rakennettu kohtuullisen rakenteen perusteella.

Viestin aika: Maaliskuu 28-2020



