

जी एक इकाई है जिसका उपयोग आमतौर पर कंपन के आयाम का वर्णन करने के लिए किया जाता हैवाइब्रेशन मोटर्सऔर रैखिक गुंजयमान एक्ट्यूएटर्स। यह गुरुत्वाकर्षण के कारण त्वरण का प्रतिनिधित्व करता है, जो लगभग 9.8 मीटर प्रति सेकंड वर्ग (m/s g) है।
जब हम 1G का कंपन स्तर कहते हैं, तो इसका मतलब है कि कंपन आयाम गुरुत्वाकर्षण के कारण एक वस्तु के अनुभव के त्वरण के बराबर है। यह तुलना हमें कंपन की तीव्रता और वर्तमान प्रणाली या अनुप्रयोग पर इसके संभावित प्रभाव को समझने की अनुमति देती है।
यह ध्यान रखना महत्वपूर्ण है कि जी सिर्फ कंपन के आयाम को व्यक्त करने का एक तरीका है, इसे अन्य इकाइयों जैसे मीटर प्रति सेकंड स्क्वैड (एम/एस our) या मिलीमीटर प्रति सेकंड वर्ग (मिमी/एस γ) में भी मापा जा सकता है, इस पर निर्भर करता है। विशिष्ट आवश्यकताओं या मानक। बहरहाल, एक इकाई के रूप में जी का उपयोग करना एक स्पष्ट संदर्भ बिंदु प्रदान करता है और ग्राहकों को प्रासंगिक तरीके से कंपन के स्तर को समझने में मदद करता है।
कंपन आयाम के एक उपाय के रूप में विस्थापन (मिमी) या बल (एन) का उपयोग नहीं करने का क्या कारण है?
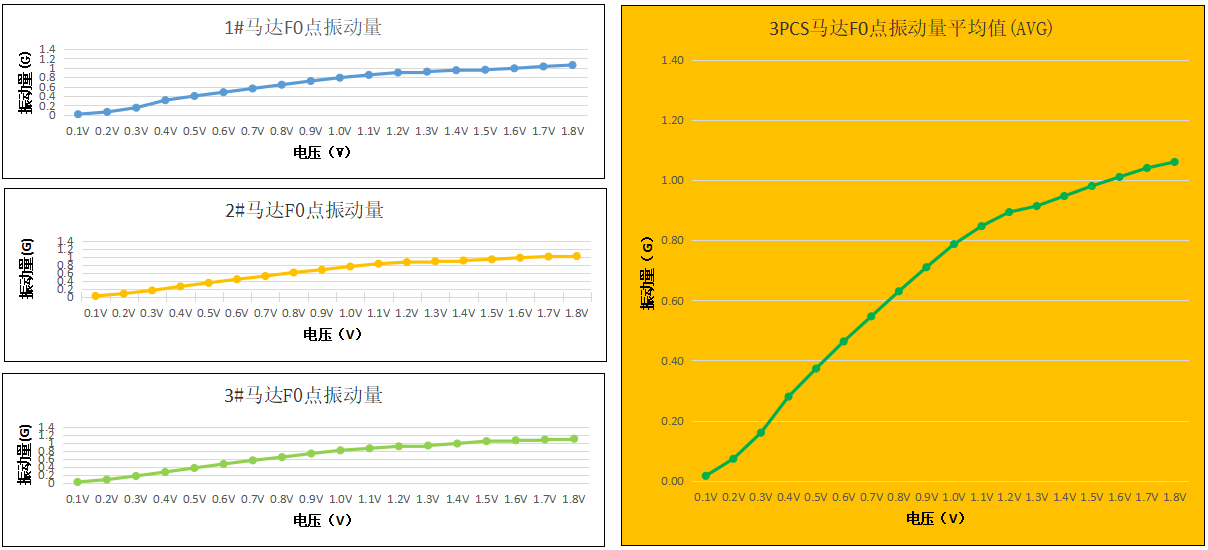
वाइब्रेशन मोटर्सआमतौर पर अकेले उपयोग नहीं किए जाते हैं। वे अक्सर लक्ष्य द्रव्यमान के साथ -साथ बड़ी प्रणालियों में शामिल होते हैं। कंपन आयाम को मापने के लिए, हम मोटर को एक ज्ञात लक्ष्य द्रव्यमान पर माउंट करते हैं और डेटा एकत्र करने के लिए एक एक्सेलेरोमीटर का उपयोग करते हैं। यह हमें सिस्टम की समग्र कंपन विशेषताओं की एक स्पष्ट तस्वीर देता है, जिसे हम तब एक विशिष्ट प्रदर्शन विशेषताओं आरेख में चित्रित करते हैं।
कंपन मोटर द्वारा लगाए गए बल को निम्नलिखित समीकरण द्वारा निर्धारित किया जाता है:
$ $ F = m \ times r \ times \ _ omega ^{2} $ $
(एफ) बल का प्रतिनिधित्व करता है, (एम) मोटर पर सनकी द्रव्यमान के द्रव्यमान का प्रतिनिधित्व करता है (पूरे सिस्टम की परवाह किए बिना), (आर) सनकी द्रव्यमान की विलक्षणता का प्रतिनिधित्व करता है, और (ω) आवृत्ति का प्रतिनिधित्व करता है।
यह ध्यान दिया जाना चाहिए कि मोटर का कंपन बल केवल लक्ष्य द्रव्यमान के प्रभाव को अनदेखा करता है। उदाहरण के लिए, एक भारी वस्तु को एक छोटे और हल्के वस्तु के रूप में त्वरण के समान स्तर का उत्पादन करने के लिए अधिक बल की आवश्यकता होती है। इसलिए यदि दो ऑब्जेक्ट एक ही मोटर का उपयोग करते हैं, तो भारी वस्तु बहुत छोटे आयाम के लिए कंपन करेगी, हालांकि मोटर्स एक ही बल का उत्पादन करते हैं।
मोटर का एक अन्य पहलू कंपन आवृत्ति है:
$ $ f = \ frac {motor \: speed \ :( rpm)} {60} $ $
कंपन के कारण होने वाला विस्थापन सीधे कंपन की आवृत्ति से प्रभावित होता है। एक वाइब्रेटिंग डिवाइस में, बल सिस्टम पर चक्रीय रूप से कार्य करते हैं। प्रत्येक बल के लिए, एक समान और विपरीत बल है जो अंततः इसे रद्द कर देता है। जब कंपन की आवृत्ति अधिक होती है, तो विरोधी बलों की घटना के बीच का समय कम हो जाता है।
इसलिए, सिस्टम को विरोध करने से पहले विस्थापित होने का समय कम है। इसके अतिरिक्त, एक भारी वस्तु में एक ही बल के अधीन होने पर हल्के ऑब्जेक्ट की तुलना में एक छोटा विस्थापन होगा। यह बल के संबंध में पहले उल्लिखित प्रभाव के समान है। एक भारी वस्तु को एक लाइटर ऑब्जेक्ट के समान विस्थापन को प्राप्त करने के लिए अधिक बल की आवश्यकता होती है।
हमसे संपर्क करें
हमारी टीम के साथ सहायता और सहायता प्रदान कर सकती हैविद्युत कंपन मोटरउत्पाद। हम समझते हैं कि अंत अनुप्रयोगों में मोटर उत्पादों को समझना, निर्दिष्ट करना, मान्य करना और एकीकृत करना जटिल हो सकता है। मोटर डिजाइन, विनिर्माण और आपूर्ति से जुड़े जोखिमों को कम करने में मदद करने के लिए हमारे पास ज्ञान और विशेषज्ञता है। अपनी मोटर से संबंधित जरूरतों पर चर्चा करने के लिए आज हमारी टीम से संपर्क करें और एक समाधान खोजें जो आपकी विशिष्ट आवश्यकताओं के अनुरूप हो। हम यहां मदद करने के लिए हैं।
अपने नेता विशेषज्ञों से परामर्श करें
हम आपको गुणवत्ता को वितरित करने और अपने माइक्रो ब्रशलेस मोटर की आवश्यकता, समय पर और बजट पर मूल्य देने के लिए नुकसान से बचने में मदद करते हैं।
पोस्ट टाइम: नवंबर -17-2023



