

LINERAR KEV COPERRY MOTORATE, tseem hu ua DRAMAR RESONANT Actuatators (LRA)Cov. LINEAR KEV CAI LAV, TSEEM CEEB TOOM RESONANT Actonant Actuatators (LRA), yog cov khoom siv muaj zog, muaj txiaj ntsig siv nyob rau hauv cov khoom siv hluav taws xob thiab cov ntawv thov. Cov motors no tau tsim los tsim cov kev co tawm, ua rau lawv haum rau ntau cov kev siv cov ntawv thov kom haum thiab tswj kev co thiab tswj kev co.
Ua Haujlwm Cov Ntsiab Cai
LRRRRRAP TSAVyog lub cev muaj zog uas tsim lub zog roj oscillating hla ib tus axis. Tsis zoo li DC eccentric tig loj loj (erm) lub cev muaj zog, ib txoj kev ua kom muaj zog real
Daim Ntawv Thov Kev Pab Cuam
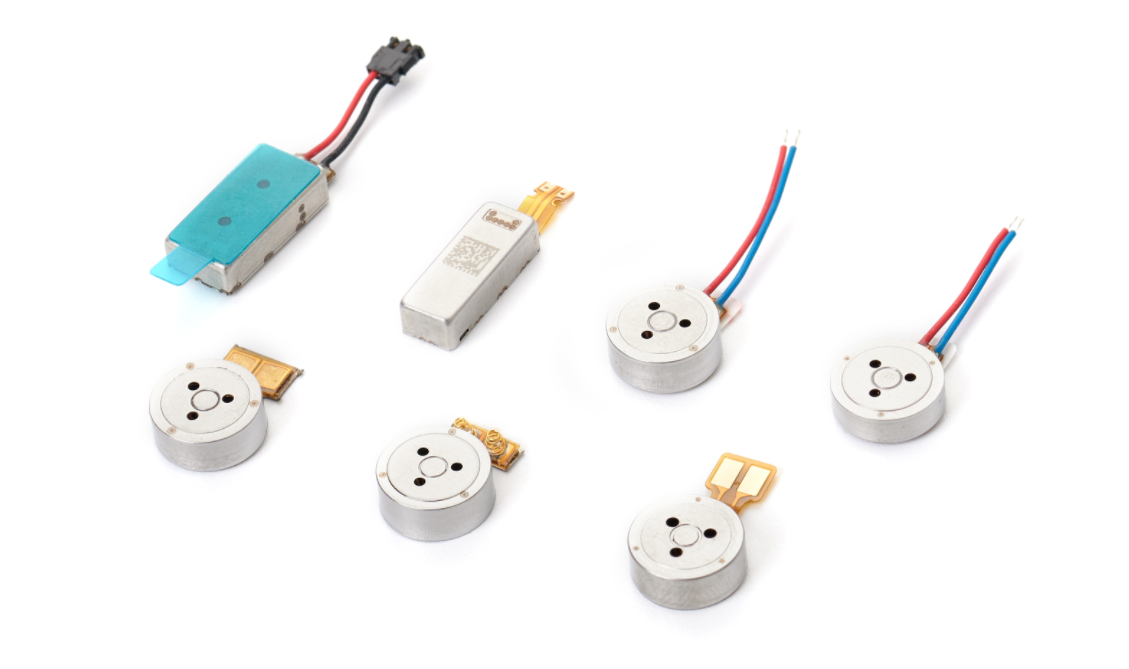
LINEAR KEV CO RAU KEV LAVOR tuaj yeem siv tau ntau yam ntawm cov cuab yeej, suav nrog cov xov tooj txawb, hnav, cov khoom siv ua si, thiab cov tswv yim tswv yim. Lawv tau siv los muab cov lus qhia haptic, thiab cov ntaub ntawv kev co hauv cov khoom siv no, yog li txhim kho cov kev ua haujlwm ntawm cov cuab yeej ntawm lub cuab yeej.
Cov Nta Tseem Ceeb:
LINERAR KEV COURING MOTORATIONMuab ob peb qhov zoo uas ua rau lawv haum rau ntau yam kev siv.
-Qhov, lawv yog kev cog lus thiab lub teeb ci ntsa iab, ua rau lawv yooj yim rau kev sib xyaw ua ke rau hauv cov khoom siv uas nqa khoom.
-Thaum, lawv tau haus lub zog tsawg, yog li pab mus rau lub neej ntev ntev hauv cov roj teeb ua haujlwm.
-Cov kev tswj hwm ntau dhau zaus thiab cov amplitude tso cai rau customization thiab optimization ntawm cov lus qhia haptic.
-Thaum cov kev co cev cov neeg muaj lub zog ua cov suab nrov nrog qhov kev pheej hmoo tsawg, txo qhov kev pheej hmoo ntawm kev puas tsuaj rau cov khoom siv rhiab.
Qhov sib txawv ntawm LRA thiab ERM Motors
Piv rau erm (eccentric tig loj loj) lub motors, lras muaj cov yam ntxwv sib txawv. LRAS tsim kev vibrations nyob rau hauv txoj kab kev taw qhia, thaum Erms tsim kev vibrations los ntawm kev sib hloov ntawm eccentric loj. Qhov kev sib txawv ntawm cov kev cuam tshuam rau cov hom haptic lawv muab. LRAS feem ntau ua ntau nuanced thiab meej chibrations, tso cai rau cov kev tswj cov finer ntawm cov ntawv thov xws li touchscreens lossis virtual kev muaj tiag. Ntawm qhov tod tes, Erms tsim kom muaj zog reelrations, ua rau lawv haum rau cov ntawv thov uas yuav tsum tau tshaj tawm tactile tactile cov lus teb, xws li lub pagers lossis tswb.
Txawm yog,LRA motors muaj lub neej ntev dua nrog ntau dua 1 lab mus.
Hauv kev co, kev co cov kev co cov tshuab raj, lossis linear tus neeg ua haujlwm rov ua, muab cov tswv yim ntawm cov lus qhia lossis cov lus qhia tawm ntawm cov kab ke. Lawv cov kev siv hluav taws xob loj, siv hluav taws xob tsawg, thiab cov yam ntxwv customizable ua rau lawv nrhiav tau-tom qab siv rau cov khoom siv hauv cov neeg siv khoom siv, cuam tshuam, thiab cov kev sib cuam tshuam, thiab kev sib txuam Yog tias koj txaus siab nyob rau hauv no LRA lub cev muaj zog, pls sib cuagThawj Coj MotorsTsum Khoom Siv!
Tham nrog koj tus thawj coj cov kws paub
Peb pab koj kom tsis txhob muaj cov pitfalls kom xa cov khoom zoo thiab muaj nuj nqis koj lub cev muaj micro brimless xav tau, ncav sijhawm thiab siv nyiaj.
Lub Sijhawm Post: Tsib Hlis-11-2024



