

DC motor bez četkiceDizajn strukture vrlo je razuman, od njegove uporabe možemo jasno osjetiti njegovu upotrebu, prednosti razumne strukture jednostavne su za upotrebu, brz rad, možemo vidjeti koliko visoke ekonomske koristi i koristiti koristi razumnu strukturu. Što je njegova struktura?
Prvo pogledajte njegovu strukturu:
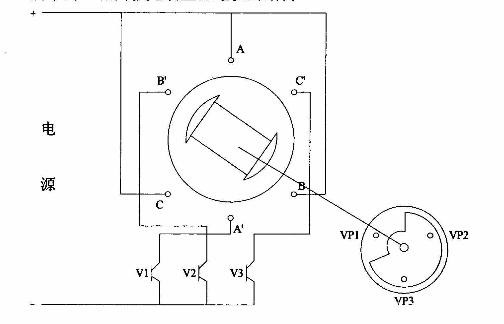
1. A, B i C su trofazni namoti statora, koji su povezani s uređajima za sklopku napajanja V1, V2 i V3 u krugu elektroničkog prekidača. Rotor za praćenje senzora položaja postavlja se na rotor motora.VP1, VP2 i VP3 ravnomjerno su raspoređeni na jednom kraju istosmjernog motora bez četkice s razlikom od 120 stupnjeva. Prema određenom fotoelektričnom uređaju, oni se zrače svjetlom ili ne putem funkcije rotirajućeg zatvarača na rotirajućoj osovini motora.
2, namota statora zajedničke električne, električne struje i glavnog magnetskog polja proizvedenih trajnim magnetima na rotoru koji je posljedica interakcije između elektromagnetskog okretnog momenta i rotacije rotora, položaj čelika magneta rotora s senzorom položaja u električne signale, a zatim kontrolirajte krug elektroničkog prekidača, tako da će svaka fazna namotavanje statora zauzvrat, zauzvrat, fazna struja statora zajedno s promjenom položaja rotora u određenom redoslijedu Komutacija. Provodni niz elektronskog prekidača može se sinkronizirati s kutom rotacije rotora kako bi se postigao mehanički učinak preokreta.
Budući da je struktura motora bez četkica postavljena razumno, tako je dobro koristiti, u procesu motoričkog rada, osim razumijevanja njegove strukture, također moramo učiniti da njegov učinak preokreta učinimo idealnijim, a to jesu U osnovi izgrađena na temelju razumne strukture.

Post Vrijeme: ožujak-28-2020



