

Posljednjih godina vodeći telefoni obično su se usredotočili na fizičko iskustvo, a ne na standard rezultata. Uzmi boljelinearni motor, na primjer.
Danas vodeći telefon s linearnim motorom ima tri koraka: One Plus 7 Pro, Meizu 16S i Oppo Reno 10x Zoom.
Napravit ćemo analizu linearnog motora, vidjeti zašto se vodeći linearni motor može nazvati King.
Isti motor je vrlo različit
Prvo što treba reći je razlika između linearnih motora i običnih motora rotora.
U stvari, linearni motori su također podijeljeni na Z-osi uzdužne linearne motore i poprečne linearne motore, iako su obojica linearni motori, ali učinak je vrlo različit, općenito govorimo o linearnom motoru je poprečni linearni motor, što je Apple Oppo Reno 10 puta zumiranje verzije linearnog motora.
Z-osi uzdužne linearne motoričke teorije ne razlikuje se mnogo od običnih motora rotora.
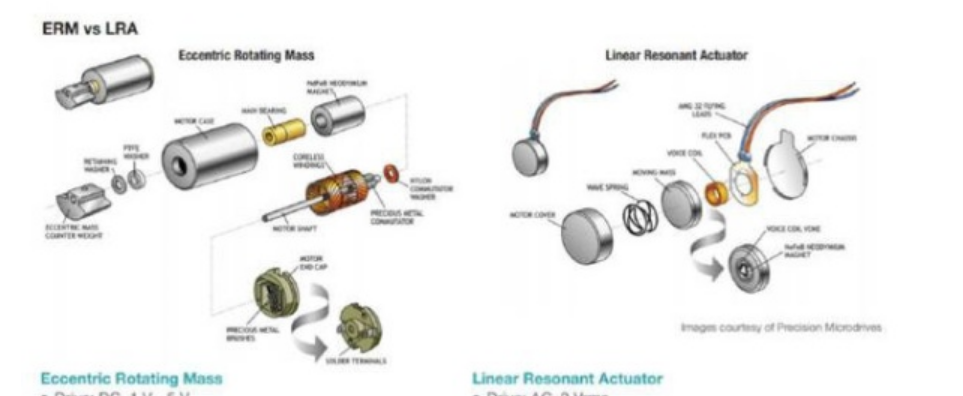
Bočni linearni motoridizajnirani su tako da vas pomaknu naprijed-nazad, desno i lijevo, stvarajući vrlo dobar osjećaj vibracije, poznat kao omni-usmjerene povratne informacije vibracija, što je izravnije i trodimenzionalniji od običnih motora rotora i Z-osi uzdužne linearne motore.
Međutim, troškovi poprečnog linearnog motora nekoliko su puta veća od uobičajene motorne sheme, a također je veći, zauzimajući prostor koji bi baterija trebala zauzeti, što zahtijeva veće zahtjeve za dizajn i izgled uređaja i kontrolu potrošnje energije . Upravo je zbog poteškoća s troškovima i dizajnom poprečni linearni motor teško popularizirati.
Optimizacija softvera je također važna
Osim troškova i dizajna, čak i s bočnim linearnim motorom, treba učiniti puno optimizacije za postizanje iskustva, a još više s softverom nego s hardverom.
Za umjeravanje linearnog motora (LRA), u zajedničkoj primjeni razine sustava su fokus, kada može dobiti odgovor linearnog motora i odgovor na to kako frekvencija i duljina istovremeno su to Sva vrlo elegantna stvar, ako želite postići iPhone iskustvo, osim hardverske podrške, također je neophodna optimizacija sustava Kung Fu.
Post Vrijeme: kolovoz-25-2019



