

DC խելագար շարժիչԿառուցվածքի ձեւավորումը շատ խելամիտ է, դրա օգտագործումից մենք կարող ենք հստակ զգալ դրա օգտագործումը, ողջամիտ կառուցվածքի առավելությունը հեշտ է օգտագործել, արագ շահագործում եւ օգտագործում է նպաստը:
Նախ նայեք դրա կառուցվածքին.
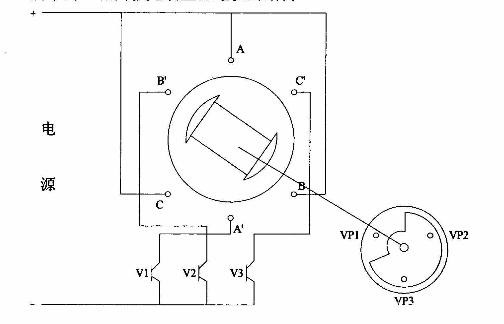
1. A, B եւ C- ն երեք փուլային վիճակագրության ոլորուն են, որոնք համապատասխանաբար կապված են էլեկտրական անջատիչի միացման էլեկտրական անջատիչ սարքերի հետ V1, V2 եւ V3: Դիրքի ցուցիչի հետեւորդ ռոտորը տեղադրված է Motor.VP1, VP2 եւ VP3- ի ռոտորի վրա հավասարաչափ բաշխվում է խոզանակային DC շարժիչի մի ծայրում `120 աստիճանի տարբերությամբ: Ըստ որոշակի ֆոտոէլեկտրական սարքի, դրանք ճառագայթվում են լույսի ներքո, թե ոչ շարժիչի պտտվող լիսեռի վրա պտտվող կափարիչի գործառույթի միջոցով:
2, ռոտորի վրա մշտական մագնիսների կողմից արտադրված ընդհանուր էլեկտրական, էլեկտրական հոսանքի եւ հիմնական մագնիսական դաշտի, էլեկտրամագնիսական մոմենտի եւ ռոտորային պտույտի միջեւ փոխազդեցության, ռոտորային մագնիսական պողպատի դիրքի դիրքը էլեկտրական ազդանշանի միջոցով փոխազդեցության, ռոտորային մագնիս պողպատի դիրքը, Եվ ապա վերահսկեք էլեկտրոնային անջատիչի միացումը, որպեսզի ստանձնի յուրաքանչյուր փուլը պտտվի, իր հերթին, իրականացվի, ստեղծում է վիճակագրության փուլը որոշակի կարգով ռոտորային դիրքի փոփոխության հետ միասին Փոխհատուցում. Էլեկտրոնային անջատիչի միացման հաղորդման հաջորդականությունը կարելի է համաժամեցնել ռոտորի ռոտացիոն անկյունով `մեխանիկական հակադարձման ազդեցության հասնելու համար:
Քանի որ խելամիտ DC շարժիչի կառուցվածքը հիմնավորված է, ուստի շատ լավ է օգտագործել, ավտոմեքենաների գործընթացի գործընթացում, բացի իր կառուցվածքը հասկանալուց, մենք նույնպես պետք է կատարենք դրա հակադարձող ազդեցությունն ավելի իդեալական, եւ դրանք հիմնականում կառուցված է ողջամիտ կառուցվածքի հիման վրա:

Փոստի ժամը: Mar-28-2020



