

DC מנוע ללא מברשותתכנון מבנה הוא סביר מאוד, מהשימוש בו אנו יכולים לחוש בבירור את השימוש בו, היתרונות של מבנה סביר קלים לשימוש, פעולה מהירה, אנו יכולים לראות כמה יתרונות כלכליים גבוהים ומשתמש בתועלות מבנה סביר. אז מה המבנה שלו?
ראשית, התבונן במבנה שלו:
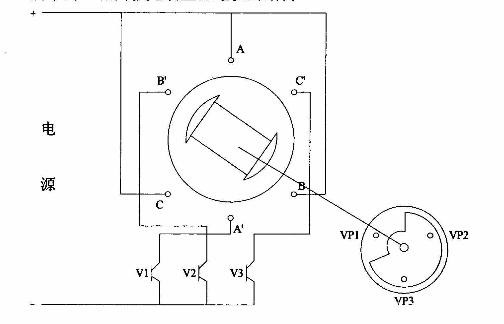
1. A, B ו- C הם פיתולי סטטור תלת פאזיים, המחוברים בהתאמה למכשירי מתג ההפעלה V1, V2 ו- V3 במעגל המתגים האלקטרוני. הרוטור המעקב של חיישן המיקום ממוקם על הרוטור של המנוע. Vp1, vp2 ו- vp3 מופץ באופן שווה בקצה אחד של מנוע DC ללא מברשת עם הפרש של 120 מעלות. על פי מכשיר פוטואלקטרי מסוים, הם מוקרנים על ידי אור או לא דרך פונקציה של התריס המסתובב על הפיר המסתובב של המנוע.
2, הסטטור המתפתל של זרם חשמלי, חשמלי נפוץ והשדה המגנטי הראשי המיוצר על ידי מגנטים קבועים ברוטור הנובע מהאינטראקציה בין מומנט אלקטרומגנטי לסיבוב הרוטור, מיקום פלדת מגנט הרוטור עם חיישן המיקום לאותות חשמליים, ואז לשלוט במעגל המתגים האלקטרוני, כך שכל הפיתול של השלב של הסטטור יביא, בתורו, זרם שלב סטטור יחד עם שינוי מיקום הרוטור בסדר מסוים ניתן לסנכרן את רצף ההולכה של מעגל המתג האלקטרוני עם זווית הסיבוב של הרוטור כדי להשיג את אפקט ההיפוך המכני.
מכיוון שמבנה המנוע של DC ללא מברשות מוגדר באופן סביר, ולכן הוא טוב מאוד להשתמש, בתהליך הפעולה המוטורית, בנוסף להבנת המבנה שלו, עלינו לעשות הוא להפוך את אפקט ההיפוך שלו לאידיאלי יותר, ואלה בעיקרון בנוי על בסיס מבנה סביר.

זמן ההודעה: MAR-28-2020



