

בשנים האחרונות, טלפוני הדגל נטו להתמקד בחוויה הפיזית ולא בתקן הניקוד. קח את המיטבמנוע לינארי, למשל.
כיום, לטלפון הדגל עם מנוע ליניארי יש שלושה שלבים: זה Plus 7 Pro, Meizu 16S ו- Oppo Reno 10x Zoom.
אנו נעשה ניתוח של המנוע הליניארי, ראו מדוע ניתן לכנות את ספינת הדגל של המנוע הליניארי.
אותו מנוע שונה מאוד
הדבר הראשון שאפשר לומר הוא ההבדל בין מנועים לינאריים למנועי רוטור רגילים.
לאמיתו רינו 10 פעמים גרסת זום של המנוע הליניארי.
חוויית התיאוריה המוטורית האורך של ציר ה- Z אינה שונה בהרבה מזו של מנועי רוטור רגילים.
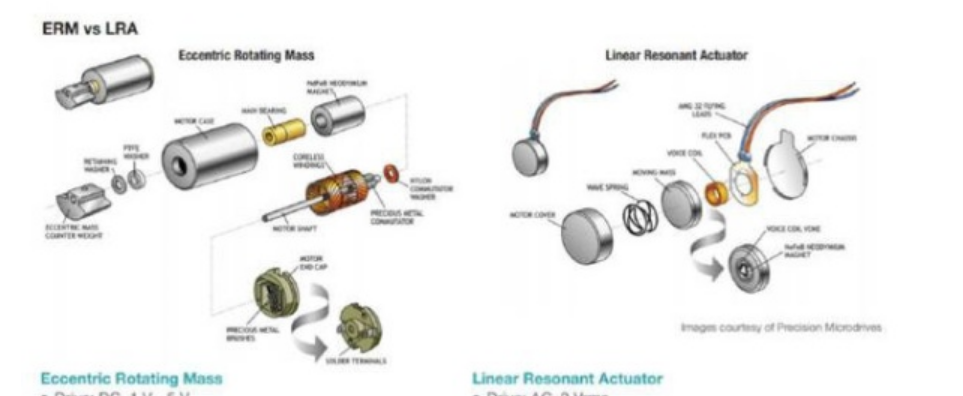
מנועים לינאריים לרוחבנועדו להזיז אותך קדימה ואחורה, ימין ושמאל, ויוצרים תחושת רטט טובה מאוד, המכונה משוב רטט-כיווני אומני, שהוא ישיר ותלת ממדי יותר ממנועי רוטור רגילים ומנועים ליניאריים אורכיים של ציר Z.
עם זאת, עלות המנוע הליניארי הרוחבי היא מספר פעמים מזה של תוכנית המנוע הרגילה, והיא גם גדולה יותר, וכובשת את המרחב שצריך לתפוס על ידי הסוללה, הדורשת דרישות גבוהות יותר לתכנון ולפריסה של מכשירים ובקרת צריכת חשמל ו זה בגלל העלות והקושי העיצובי שקשה לפופולרי מנוע ליניארי רוחבי.
אופטימיזציה של תוכנה חשובה גם היא
בנוסף לעלות ועיצוב, אפילו עם מנוע ליניארי לרוחב, יש הרבה אופטימיזציה שיש לבצע כדי להשיג את החוויה, ואף על פי שתוכנה מאשר עם חומרה.
לכיול המנוע הליניארי (LRA), ביישום המשותף של רמת המערכת, הם המוקד, מתי יכול לקבל את התגובה של המנוע הליניארי, ואת התגובה של התדר והאורך בו זמנית, אלה הם כל הדבר האלגנטי מאוד, אם אתה רוצה להשיג את חווית האייפון, בנוסף לתמיכה בחומרה, גם אופטימיזציה של המערכת של Kung FU היא חיונית.
זמן ההודעה: אוגוסט-25-2019



