

מהו מנוע טלפון נייד?
מנוע טלפון ניידבדרך כלל מתייחס ליישום הרטט של טלפון נייד DA קטן, תפקידו העיקרי הוא להפוך את אפקט הרטט של הטלפון הנייד; אפקט הרטט משמש משוב למשתמש במהלך הפעלת הטלפון הנייד.
ישנם שני סוגים של מנועים בטלפונים ניידים: מנועי רוטור ומנועים לינאריים
מנוע הרוטור:
מנועי הרוטור שנקראים דומים לאלה שנראו ברכבי הנעה ארבעה גלגלים. כמו מנועים קונבנציונליים, הם משתמשים בגיוס אלקטרומגנטי, שדה מגנטי שנוצר על ידי זרם חשמלי, כדי להניע את הרוטור להסתובב ולרטוט.
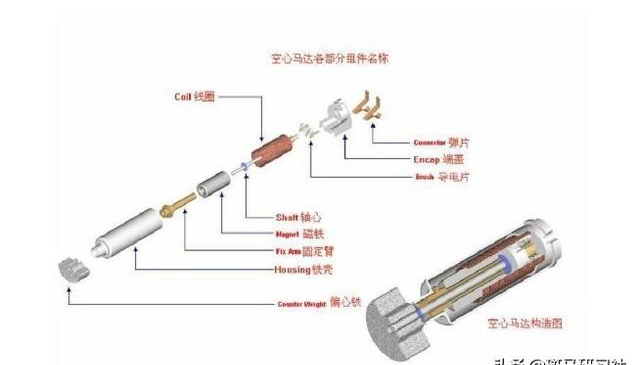
תרשים מבנה מנוע רוטור
כפי שמוצג כאן
בעבר, מרבית תוכניות הרטט של טלפונים ניידים מאמצים את מנוע הרוטור. למרות שלמנוע הרוטור יש תהליך ייצור פשוט ועלות נמוכה, יש לו מגבלות רבות. לדוגמא, הפעלה איטית, בלימה איטית ורטט לא כיווני עלולים לגרום ל"גרור "בולט כאשר הטלפון רוטט, כמו גם שום הנחיה כיוונית ( חשבו על העבר כשמישהו התקשר והטלפון הסתובב וקפץ).
והנפח, ובמיוחד העובי, של מנוע הרוטור קשה לשלוט, ומגמת הטכנולוגיה הנוכחית דקה ודקה יותר, גם לאחר שיפור, מנוע הרוטור עדיין קשה לעמוד בדרישות הקפדניות בגודל החלל של הטלפון.
מנוע הרוטור מהמבנה מחולק גם לרוטור רגיל ורוטור מטבע
רוטור נפוץ: נפח גדול, תחושת רטט לקויה, תגובה איטית, רעש חזק
רוטור מטבעות: גודל קטן, תחושת רטט לקויה, תגובה איטית, רטט קל, רעש נמוך
יישום ספציפי:
מנוע רוטור רגיל
אנדרואיד (Xiaomi):

מנוע רטט של זרימת SMD SMD (מנוע הרוטור משמש לרדמי 2, Redmi 3, Redmi 4 תצורה גבוהה)

(משתמש מנוע הרוטור Redmi Note2)
vivo :

Vivo nex רוטור רוטור מנוע
מנוע רוטור מטבע
Oppo Find X:
בתוך הבחירה המעגלית נמצא מנוע הרוטור בצורת מטבע המותקן על ידי Oppo Find X
IOS (iPhone):
האייפון המוקדם ביותר השתמש בטכניקה שנקראת מנוע רוטור רוטור אקסצנטרי "ERM" (מנוע ליניארי), יכול להיות מסיבות שטח, התפוח באייפון 5, 5 צלזיוס, 5 שניות השתנה למנוע ה- ERM.

ה- iPhone 3GS מגיע עם מנוע רוטור אקסצנטרי ERM

ה- iPhone 4 מגיע עם מנוע רוטור אקסצנטרי ERM

ה- iPhone 5 מגיע עם מנוע רוטור אקסצנטרי ERM

מנוע הרוטור בצד שמאל של ה- iPhone5C ובצד ימין של ה- iPhone5 כמעט זהה במראה
מנוע לינארי:
בדומה לנהג ערימה, מנוע ליניארי הוא למעשה מודול מנוע שממיר אנרגיה חשמלית ישירות (הערה: ישירות) לאנרגיה מכנית לינארית באמצעות מסת אביב שנעה בצורה ליניארית.
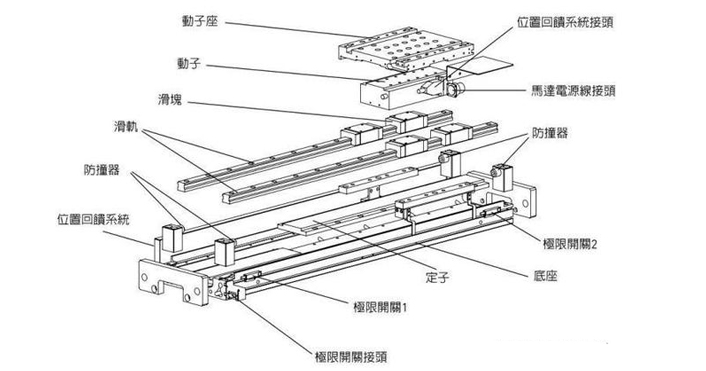
תרשים מבנה מנוע לינארי
המנוע הליניארי מרגיש קומפקטי יותר לשימוש, והוא דק יותר, עבה ויעיל יותר באנרגיה. אך העלות גבוהה יותר ממנוע הרוטור.
נכון לעכשיו, מנועים לינאריים מחולקים בעיקר לשני סוגים: מנועים לינאריים רוחביים (ציר XY) ומנועים לינאריים מעגליים (ציר Z).
במילים פשוטות, אם מסך היד הוא האדמה שאתה עומד עליו כרגע, אתה נקודה במסך, מתחיל בעצמך, הגדרת ציר ה- x בכיווני שמאל וימין, הגדרת ציר Y מקדימה ומאחור הוראות והגדרת ציר ה- Z עם למעלה ולמטה (ראש למעלה ופנה למטה).
המנוע הליניארי לרוחב הוא זה שדוחף אותך הלוך ושוב (ציר XY), ואילו המנוע הליניארי המעגלי הוא זה שמניע אותך למעלה ולמטה (ציר Z) כמו רעידת אדמה.
למנוע הליניארי המעגלי יש שבץ קצר יותר, כוח רטט חלש יותר ומשך זמן קצר יותר, אך הוא משתפר הרבה בהשוואה למנוע הרוטור.
יישום ספציפי:
IOS (iPhone):
מנוע לינארי מעגלי (ציר Z)
גרסת ה- CDMA של ה- iPhone 4 ו- iPhone 4S השתמשו בקצרה במנוע LRA בצורת מטבע (מנוע ליניארי מעגלי)

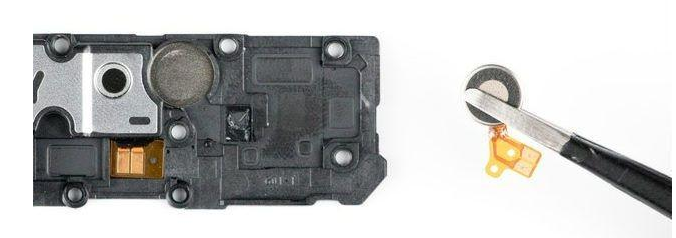
מנוע לינארי (מנוע לינארי מעגלי) המשמש לראשונה ב- iPhone4s

לאחר פירוק

לאחר שהמנוע מתפרק
(2) מנוע ליניארי רוחבי (ציר xy)
מנוע ליניארי ראשוני:
באייפון 6 ו 6 פלוס, אפל החלה רשמית להשתמש במנוע LRA LRA המוארך, אך הרטט הרגיש שונה מאוד ממנועי הליניאריים או הרוטור המעגליים בה השתמשו בעבר, בגלל הרמה הטכנית.

המנוע הליניארי המקורי ב- iPhone6

לאחר פירוק

LRA ליניארי מנוע ב- iPhone6plus

לאחר פירוק

המנוע הליניארי LRA העובד ב- iPhone6plus
האנדרואיד:
בהובלת אפל, מוטור ליניארי, כדור חדש של טכנולוגיית מנוע טלפונים ניידים, מוכר בהדרגה על ידי יצרני הטלפונים הניידים. MI 6, אחד פלוס 5 וטלפונים ניידים אחרים היו מצוידים ברציפות במנוע ליניארי בשנת 2017. אבל החוויה רחוקה ממודול המנוע הטפטי של אפל.
ורוב דגמי האנדרואיד הנוכחיים (כולל ספינת הדגל) משתמשים במנועים לינאריים מעגליים.
להלן כמה דגמים המצוידים במנוע ליניארי מעגלי (ציר Z):
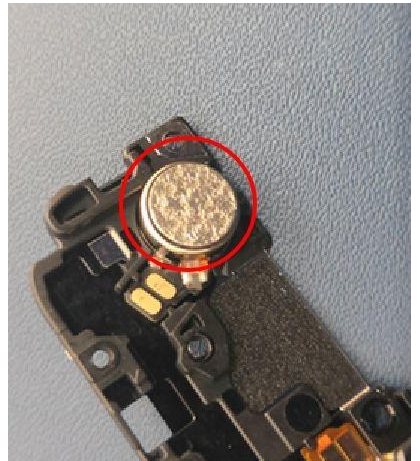
ספינת הדגל החדשה Mi 9 שהושקה בחודש שעבר:

בתוך הבחירה המעגלית נמצא מנוע ליניארי עגול בגודל גדול (ציר Z) המותקן על ידי ה- Mi 9.
Huawei Mated Mate 20 Pro:

בתוך הבחירה המעגלית נמצא המנוע הליניארי המעגלי המקובל (ציר Z) המותקן על ידי Mate 20 Pro.
V20 תהילה:
במבחר המעגלי נמצא המנוע הליניארי המעגלי המקובל (ציר Z) המותקן על ידי התהילה V20.
לסיכום:
על פי עקרון הרטט השונה, ניתן לחלק את מנוע הרטט של הטלפון הניידמנוע רוטורומנוע ליניארי.
הן מנוע הרוטור והן רטט המנוע הליניארי מבוססים על העיקרון של הכוח המגנטי. מנוע הרוטור מניע רטט משקל נגדי על ידי סיבוב, ושיקים מנועיים ליניאריים על ידי טלטול מהיר של משקל נגדי על ידי כוח מגנטי.
מנועי הרוטור מחולקים לשני סוגים: רוטור רגיל ורוטור מטבע
מנועים לינאריים מחולקים למנועים לינאריים אורכיים ומנועים לינאריים רוחביים
היתרון של מנועי הרוטור זול, ואילו היתרון של מנועים ליניאריים הוא ביצועים.
מנוע רוטור רגיל להשגת עומס מלא בדרך כלל זקוק ל -10 רטט, ניתן לתקן את המנוע הליניארי פעם אחת, האצת המנוע הליניארית גדולה בהרבה ממנוע הרוטור.
בנוסף לביצועים טובים יותר, רעש הרטט של המנוע הליניארי הוא גם נמוך משמעותית מזה של מנוע הרוטור, אותו ניתן לשלוט בתוך 40dB.
מנועים לינארייםספק חוויית רטט יותר (תאוצה גבוהה), זמן תגובה מהיר יותר וחוויית רטט שקטה יותר (רעש נמוך).
זמן ההודעה: אוגוסט 16-2019



