

בפרויקט זה נראה כיצד לבנות אמנוע רטטמַעְגָל.
אמנוע ויברטור של DC 3.0Vהוא מנוע שרוטט כאשר מקבל כוח מספיק. זה מנוע שממש טלטל. זה טוב מאוד לחפצים רוטטים. ניתן להשתמש בו במספר מכשירים למטרות מעשיות מאוד. לדוגמה, אחד הפריטים הנפוצים ביותר הרוטטים הם טלפונים סלולריים הרוטטים כאשר הם נקראים כאשר הם ממוקמים במצב רטט. טלפון סלולרי הוא דוגמא כזו למכשיר אלקטרוני המכיל מנוע רטט. דוגמא נוספת יכולה להיות חבילת רמבל של בקר משחק שמטלטל, מחקה את פעולות המשחק. בקר אחד בו ניתן להוסיף חבילת רמבל כאביזר הוא נינטנדו 64, שהגיע עם חבילות רמבל כך שהבקר ירטוט כדי לחקות פעולות משחק. דוגמה שלישית יכולה להיות צעצוע כמו פרבי שרוטט כשאתה משתמש עושה פעולות כמו לשפשף אותו או לסחוט אותו וכו '.
כָּךDC מיני מגנט רוטטבמעגלים מוטוריים יש יישומים שימושיים ומעשיים מאוד שיכולים לשרת מספר עצום של שימושים.
לגרום למנוע רטט לרטוט זה פשוט מאוד. כל שעלינו לעשות הוא להוסיף את המתח הדרוש לשני המסופים. למנוע רטט יש 2 מסופים, בדרך כלל חוט אדום וחוט כחול. הקוטביות לא משנה מנועים.
עבור מנוע הרטט שלנו, אנו נשתמש במנוע רטט באמצעות מיקרו -ריבוי מדויק. למנוע זה טווח מתח הפעלה של 2.5-3.8 וולט להפעלה.
כך שאם נחבר 3 וולט על פני הטרמינל שלו, הוא ירטוט ממש טוב, כמו שמוצג להלן:
זה כל מה שצריך כדי לגרום למנוע הרטט לרטוט. ניתן לספק את 3 וולט על ידי 2 סוללות AA בסדרה.
עם זאת, אנו רוצים לקחת את מעגל מנוע הרטט לרמה מתקדמת יותר ולתת לו להיות נשלטת על ידי בקר מיקרו כמוארדואינו.
בדרך זו, אנו יכולים לקבל שליטה דינאמית יותר על מנוע הרטט ויכולים לגרום לו לרטוט במרווחים מוגדרים אם אנו רוצים או רק אם מתרחש אירוע מסוים.
אנו נראה כיצד לשלב מנוע זה עם ארדואינו לייצור שליטה מסוג זה.
באופן ספציפי, בפרויקט זה, אנו נבנה את המעגל ונתכנת אותו כך ש-מנוע רוטט מטבע12 מ"מ רוטט כל דקה.
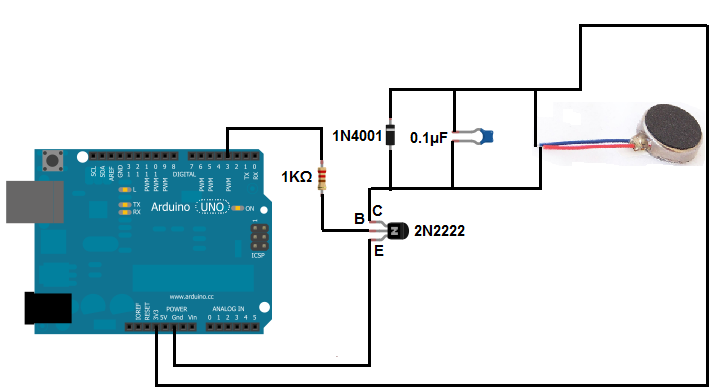
מעגל מנוע הרטט שנבנה מוצג להלן:
התרשים הסכמטי של מעגל זה הוא:
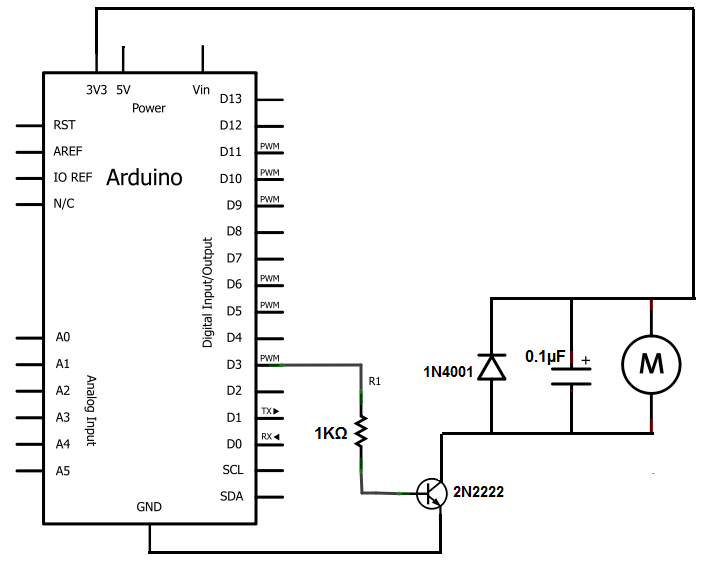
כשנוהגים במנוע עם בקר מיקרו כמו הארדואינו שיש לנו כאן, חשוב לחבר בין דיודה הפוך מוטה במקביל למנוע. זה נכון גם כשנוהגים בו עם בקר מנוע או טרנזיסטור. הדיודה משמשת כמגן מתח נגד מתח מתח שהמנוע עשוי לייצר. פיתולי המנוע מייצרים באופן ידוע לשמצה קוצים מתח כשהוא מסתובב. ללא הדיודה, מתחים אלה יכולים להרוס בקלות את בקר המיקרו שלך, או לבקר מנוע IC או לזרום טרנזיסטור. כאשר פשוט הפעילו את מנוע הרטט ישירות עם מתח DC, אז אין צורך בדיודה, וזו הסיבה שבמעגל הפשוט יש לנו לעיל, אנו משתמשים רק במקור מתח.
הקבל 0.1μF סופג דוקרני מתח המיוצרים כאשר המברשות, שהם אנשי קשר המחברים בין זרם חשמלי לפיתולי המנוע, פתוחים וסוגרים.
הסיבה שאנו משתמשים בטרנזיסטור (2N2222) היא מכיוון שלרוב בקרי המיקרו יש תפוקות זרם חלשות יחסית, כלומר הם לא מפליטים מספיק זרם בכדי להניע סוגים רבים של מכשירים אלקטרוניים. כדי לפצות על התפוקה הנוכחית החלשה הזו, אנו משתמשים בטרנזיסטור כדי לספק הגברה שוטפת. זו המטרה של טרנזיסטור 2n2222 זה בו אנו משתמשים כאן. מנוע הרטט זקוק לכ- 75mA של זרם כדי להיות מונע. הטרנזיסטור מאפשר זאת ואנחנו יכולים להניע אתמנוע מסוג מטבע 3V 1027ו כדי לוודא כי יותר מדי זרם אינו זורם מהפלט של הטרנזיסטור, אנו מציבים 1KΩ בסדרה עם בסיס הטרנזיסטור. זה מקטין את הזרם לסכום סביר כך שיותר מדי זרם אינו מפעיל אתמנוע רוטט מיני 8 מ"מו זכור כי טרנזיסטורים בדרך כלל מספקים פי 100 מההגברה לזרם הבסיס שנכנס אליו. אם לא נניח נגן בבסיס או בפלט, יותר מדי זרם יכול להזיק למנוע. ערך הנגד 1kΩ אינו מדויק. ניתן להשתמש בכל ערך עד בערך 5kΩ לערך.
אנו מחברים את הפלט שהטרנזיסטור יניע לאספן הטרנזיסטור. זהו המנוע כמו גם כל הרכיבים שהוא זקוק לו במקביל אליו להגנה על המעגלים האלקטרוניים.
זמן הודעה: אוקטובר -12-2018



