

DCブラシレスモーター構造設計は非常に合理的です。その使用から、その使用を明確に感じることができます。合理的な構造の利点は使いやすく、迅速な操作です。
まず、その構造を見てみましょう。
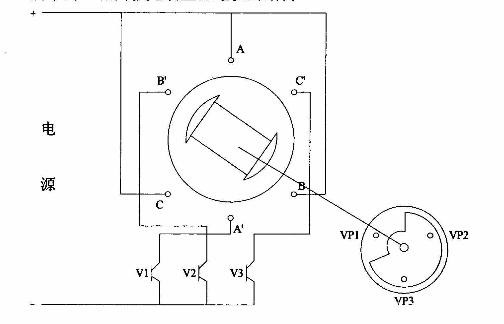
1。A、B、およびCは、電子スイッチ回路の電源スイッチデバイスV1、V2、およびV3にそれぞれ接続されている3相ステーター巻線です。位置センサーのトラッキングローターは、Motor.VP1、VP2、およびVP3のローターに配置され、120度の差でブラシレスDCモーターの一端に均等に分布しています。特定の光電子装置によると、それらはモーターの回転シャフト上の回転シャッターの機能を介して光によって照射されているかどうかを介して照らされています。
2、電磁トルクとローター回転との相互作用に起因するローター上の永久磁石によって生成される一般的な電気、電流、および主要な磁場のステーター巻き、電気信号への位置を備えたローター磁石鋼の位置、次に、電子スイッチ回路を制御し、ステーターの各位相巻線が、一定の順序整流でのローター位置の変化とともに、伝導、ステーター相電流を順番に制御します。電子スイッチ回路のシーケンスは、ローターの回転角と同期して、機械的反転効果を実現できます。
ブラシレスDCモーター構造は合理的にセットアップされているため、モーターの動作の過程で、その構造を理解することに加えて使用することは非常に良いため、その逆効果をより理想的にする必要があります。基本的に合理的な構造に基づいて構築されています。

投稿時間:Mar-28-2020



