

触覚フィードバックと振動モーターの背後にある科学の探索
とも呼ばれるマイクロ振動モーター触覚フィードバックモーター。さまざまな電子デバイスのユーザーに触覚フィードバックを提供する上で重要な役割を果たしています。これらのモーターには、偏心回転質量(ERM)や線形共鳴アクチュエーター(LRA)など、さまざまな形があります。これらのモーターの性能を理解するときは、振動力、加速、変位などの要因を考慮する必要があります。しばしば発生する基本的な質問は、マイクロ振動モーターの変位がその周波数にどのように関連しているかです。
変位と頻度の関係を理解する。
これらの用語は最初に定義する必要があります。変位とは、モーターの振動要素が休憩位置から移動する距離を指します。のためにERMSとLRAS、この動きは、通常、偏心腫瘤またはスプリングに接続されたコイルの振動によって生成されます。一方、周波数は、特定の時間単位でモーターが生成できる完全な振動またはサイクルの数を表し、通常はHertz(Hz)で測定されます。
一般的に言えば、振動モーターの変位はその周波数に比例します。これは、モーターの周波数が増加すると、変位も増加し、振動要素の動きの範囲が幅広くなることを意味します。
いくつかの要因は、マイクロ振動モーターの変位周波数関係に影響します。
振動要素のサイズと重量を含むモーターの設計と構造、および(LRAの)磁場強度は、異なる周波数で変位を決定する上で重要な役割を果たします。さらに、モーターに適用される入力電圧と駆動信号は、その変位特性に影響します。
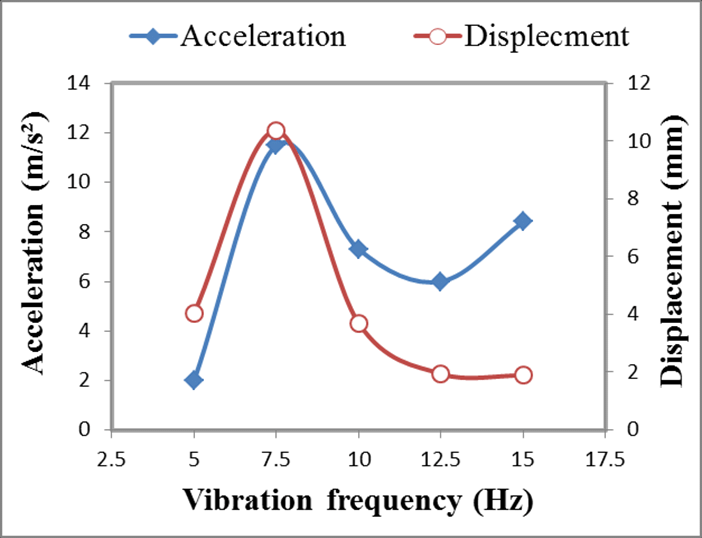
の変位はコイン振動モーター7mmその周波数に関連しているため、全体的な振動力や加速などの他の要因もモーターの性能に影響します。振動力は重力の単位で測定され、モーターによって生成される振動の強度または強度を反映します。一方、加速は、振動要素の速度の変化速度を表します。これらのパラメーターは、変位と頻度と組み合わせて使用され、モーターの動作を完全に理解することができます。
要約すれば
aの変位と周波数の関係マイクロ振動モーターその機能の重要な側面です。この関係を理解し、振動力や加速などの他の要因を考慮することにより、エンジニアと設計者は電子デバイスでより効果的な触覚フィードバックシステムを作成できます。テクノロジーが進歩し続けるにつれて、振動モーターダイナミクスの研究は、さまざまなアプリケーションでのユーザーエクスペリエンスの向上に重要な役割を果たします。
リーダーの専門家に相談してください
マイクロブラシレスモーターの必要性を時間通りに、予算内で価値を提供するために、落とし穴を回避するのに役立ちます。
投稿時間:Jan-27-2024



