

최근 리더 팀은 Harbin Institute of Technology 팀과 함께 모바일 로봇에 적용 할 수있는 마이크로 진동 모터를 개발했습니다. 연구 결과는 국제적으로 인정 된 저널 Advanced Science에서 정기 논문으로 출판되었습니다. 이 연구는 SEAL Pacing 및 Hopping과 유사한 새로운 드라이브 방법을 탐색하여 Rigid-Body Robot이 똑바로 똑바로, 아크, 스티어링 및 기타 유연한 움직임을 실현할 수있게 해줍니다. 단일 모터 구동 모바일 로봇 설계에 대한 새로운 아이디어를 제공합니다.
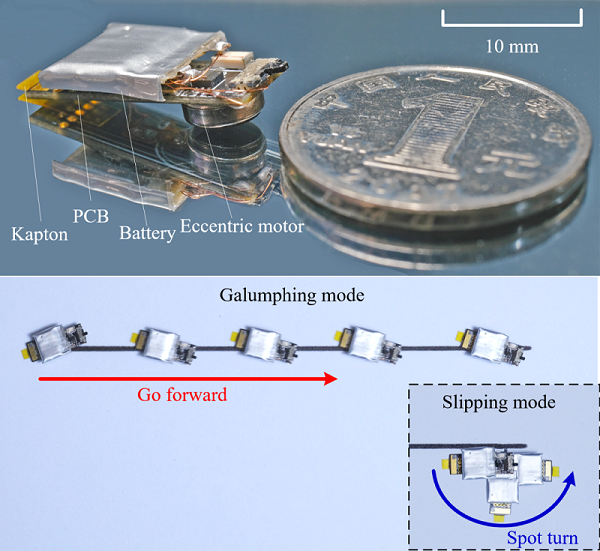
단일 모터는 또한 비행기에서 앞으로 움직이고 움직일 수 있습니까? 맞습니다. 여기에 묘사 된 로봇은 GASR이라고하며 편심 모터, 배터리, 회로 보드 및 폴리이 미드 시트의 네 부분으로 구성됩니다. 그것은 유연하고 자유롭게 앞으로 실현하고 움직임을 바꿀 수 있습니다. 핵심 드라이버 중 하나 -버튼 코인 타입 편심 로터 모터리더 마이크로 전자 제품에 의해 제작. 많은 스마트 장치의 진동 모터와 마찬가지로, 단일 드라이버가 유연한 움직임을 달성 할 수있는 원리는 정확히 무엇입니까?
어떻게 운전됩니까?
내부동전 모터고정자와 로터입니다. 모터는 모델을 구동하는 진동을 생성함으로써 진동하며, 이는 법인들 사이에 전자기력을 생성하는 원리에 기초한다.
단일 편심 모터는 드라이브를 원하는 선형 또는 회전 운동으로 회전시키고 변환하여 전원 드라이브를 생성합니다. 드라이브가 실현되는 작업 유형 중에는 직선, 아크 및 스티어링이 있습니다. 일정한 전압 하에서, 모터는 단순한 원리로 작동하여 에너지 전압을 사용하여 모듈의 전방 및 역 궤적을 달성하여 완전한 순환 운동을 달성 할 수 있습니다. 상이한 상수 전압 상태 모듈 작동은 이상적인 유형의 이동 궤적을 실현하기 위해 전압의 크기에 따라 조정할 수 있습니다.
그만큼미니어처 진동 모터(ERM 동전 진동 모터, 7mm 직경) 우리는 Harbin Institute of Technology를 제공 한 것은 작은 크기, 경량, 저음 등의 장점을 가지고 있습니다. 우리는 고객의 다양한 요구를 충족시키는 개발 기능을 갖춘 자체 R & D 팀을 보유하고 있으며 고객이 다양한 스타일의 맞춤형 모터를 수행 할 수있는 고객 시나리오 사용과 결합되어 있습니다.
리더 전문가에게 문의하십시오
우리는 당신이 함정을 피하기 위해 함정을 피하고 마이크로 브러시리스 모터 요구를 정시 및 예산으로 평가하는 데 도움이됩니다.
시간 후 : 2 월 29-2024 년



