

Induco
Micro Motors VibrationisLudere vitalis partes in variis applications vndique a dolor electronics ad medicinae cogitationes. Et enable haptic videre, metum notificationes, et tremor-fundatur alerts ad augendae ad user experientia. Inter alia genera Micro vibrationis Motors in foro, duo maxime communia variants suntErm (Eccentrici Rotating Missam) Vibrationis MotorsEt LRA (lineares resonant actuator) vibrationis motors. Hoc articulum fert ad declarare differentias inter Erm et LRA tremunt Motors, elucidating eorum mechanica structuram, perficientur et applications.
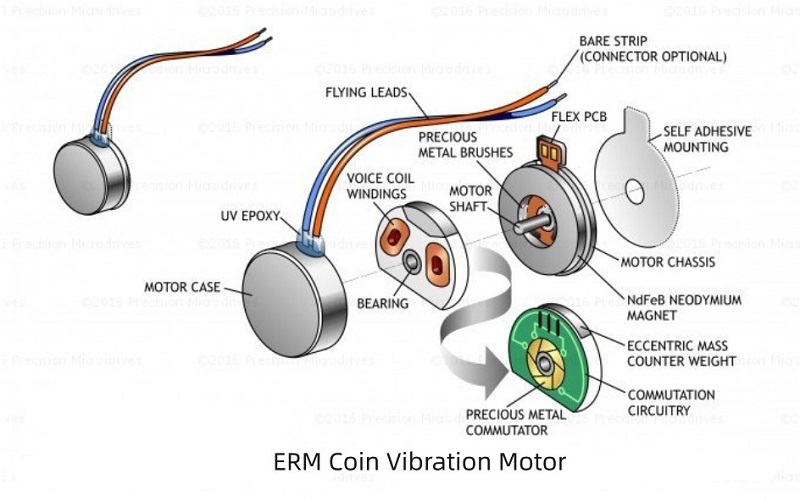
Disce de Erm Vibration Motors
Erm Vibration Motorssunt late propter eorum simplicitas, cost-efficaciam et latum compatibility. Motors consistunt ex eccentrici massa rotating in motor hastile. Cum massa gotates gignit inaequaliter vim, quae facit tremor. In amplitudine et frequency de vibrationis potest esse adaequatum per moderantum gyrationis celeritate. Erm motoribus disposito ad vibrationum super late frequency range, faciens apta tam leni et intensa notificationes.
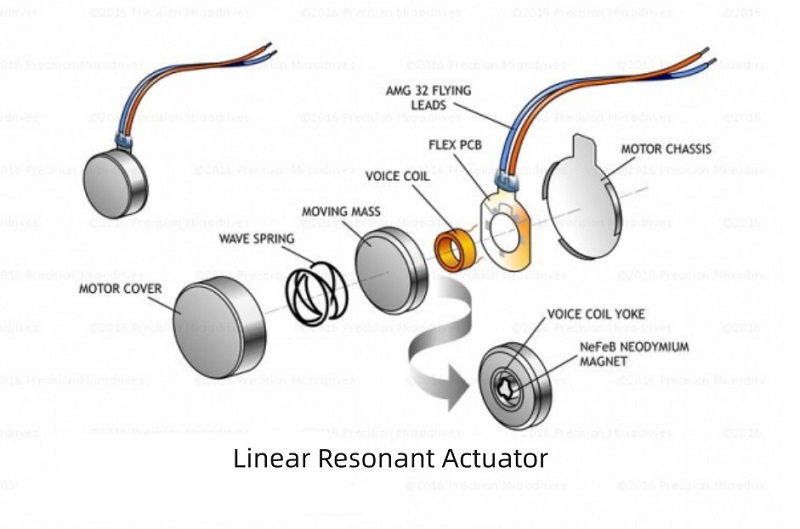
Disce de LRA Vibration Motors
LRA Vibrationis MotorsIn alia manu, utendum a diversis mechanism ad generare vibrationem. Consistit massa coniuncta fontem formatam resonant ratio. Cum electrica signum applicatur, motricium in coil causat massa oscillate et egrediebatur in ver. Haec oscillatione producit vibrationem ad resonantem frequentiam motricium. Dissimilis erm motors, lras pluma linearibus motu, unde in humilis virtute consummatio et excelsum industria efficientiam.
Comparative Analysis
I. Efficaciam et accurate:
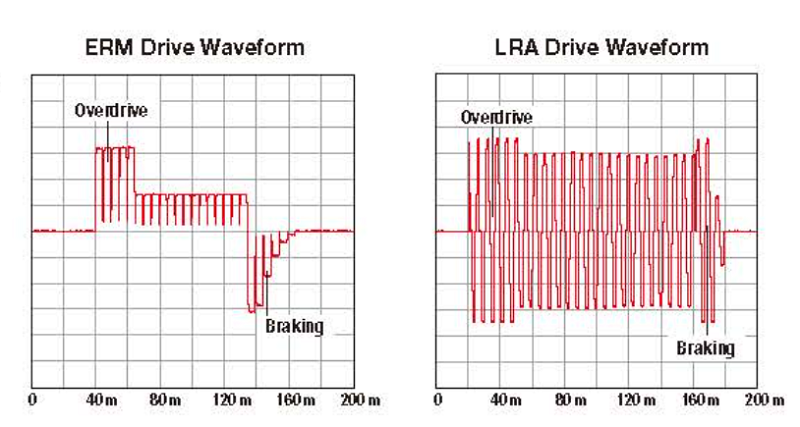
Erm Motors typically consumat magis potentia comparari ad lras ex eorum gyratorium motus. LRA est pulsus lineari oscillationis, quae est efficiens et consumit minus potestatem dum tradens precise vibrationum.
II. Imperium et flexibilitate:
ERM Motors Excel ad delivering latius range de vibrationum ex rotating ecentrici massa. Sunt relative facile ad imperium et patitur manipulation frequency et amplitudine.More linearibus motriciumHabet linearibus motus, quod praebet meliorem imperium, sed solum intra speciei frequency range.
III. RESPONDET tempus et diuturnitatem:
Erm Motors exhibent citius responsum temporibus, quia ipsi libera vibrationis statim super activation. Tamen, ex rotating mechanism, sunt proni ad induendum et lacrimam durante diu-term usus. Lra habet oscillans mechanism qui durat iam et magis durabile applications quod requirere extenditur usum.
4.Noise et vibrationis characteres:
Erm Motors tendunt ad producendum magis sonitus et transmit vibrationum ad circumvectionem. Contra LRA est levior vibrationum cum minima sonitus, faciens idoneam applications requirere discretos tactile feedback.
Applicationem locis
ErmParvus pulmentum motorsSunt communiter in cell phones, wearable cogitationes, et ludum moderatoris requirere amplis vibrationum. Lras, in alia manu, saepe in medicinae cogitationes, touchscreens et wearables quod requirere precise et subtiles vibrationum.
Conclusio
In summary, ad arbitrium estErm et LRA Vibration Motorspendeat in propria applicationem elit. Erm Motors offerre latius vibrationem range ad sumptionem sumptionem, cum Lras providere magis precise tremor et maior industria efficientiam. Intelligentes haec differentias potest auxilium gravida, engineers et developers et certiorem decisiones, cum eligens Micro vibrationis Motors pro eorum propriis applications. Ultimately, ad arbitrium inter erm et LRA Motors debet esse secundum factores ut potentia efficientiam, control flexibilitate, requiratur accurate, diuturnitatem, et strepitu considerations.
Consule tua Dux Periti
Nos auxilium vobis vitare foveisque ut eripere qualis et valorem vestri Micro Brushless motor opus, on-vicis et in budget.
Post tempus: Nov, 24-2023



