

Sinis Vibrationis motricium Factoryet inducereSmt motriciumetlinearibus motriciumAd te hodie.
Lets 'satus cum phone motricium est:
Mobile phone motricium plerumque refert ad applicationem de vibrationis de mobile phone parva da, eius principalis munus est ad mobile phone vibrationis effectus;
Et vibrationis modum serves ut feedback in user per operationem in mobile phone.The vibrationem nostrorum phones, feedback nostra buttons, omnes ad facere cum motoribus;
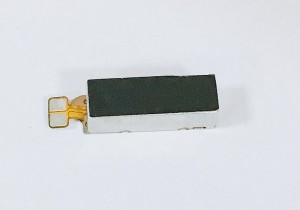
Sit scriptor satus cum SMT motricium
Et SMT motricium, quod suus 'dicitur, est similis motricium videmus in toy cars.like conventional Motors, utuntur electro inductione, magnetica agro creata per electrica current, ut eiciam rotor ad nent et vibrate.
Nunc, multi mobile phone cogitationes plerumque capere SMT motricium. Licet Rotor motricium habet simplex vestibulum processus et humilis sumptus, non habet multa limitations.
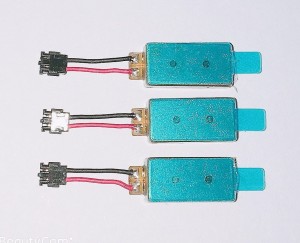
Start slow, slow brake, for example, vibration omnidirectional, these defects will let users in the cell phone vibration obviously feel "slow", and the volume of motor rotor, especially thickness is hard to control, and the only mobile phone technology trend is Magis et magis tenuis, etiam post emendationem, in SMT motor sunt adhuc difficile in occursum spatium dimensionem de stregring requisita in phone.
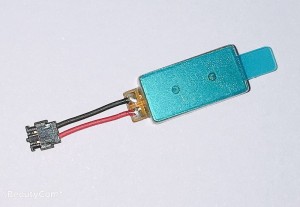
SMT motricium ex structuram etiam divisa in Ordinarius Rotor et Coin Rotor Ordinarius Rotor: Large volumine, pauper vinum sentire, tardus responsio, sua strepitu.
Magna-Food Rotor: Parvus Volubilis, Pauper vibrationis sentire, tardus responsio, levi tremens, low strepitu;
Lets Disputatio de linearibus Motors
Like a pile driver, a linear motor is actually an engine module that converts electrical energy directly (note: directly) into linear mechanical energy by means of a spring mass that moves in a linear fashion.
Nam Rotor Motors, linearibus Motors sumptus magis.
In praesens, linearibus motores sunt maxime dividitur in duo genera: transversus linearibus Motors (xy axis) et circularis linearibus motors (z axis).
Circularis linearibus Motor est leviter inferior ad transversum linearibus motricium, quod est optimus vibrationis ratio ad present.circular linearibus Motors sumptus de $ V et lateralis linearibus Motors inter $ VIII et $ X.
Si supra introductio non sufficit vobis, vos can vado ad mobile phone experientia copia et sentire mobile phones cum his motoribus respectively. Etenim, ibi sunt differentias inter speculativum introductio et ipsam manibus-in experientia, sed possumus evidenter intelligere linearibus motricium est optimus motricium ratio ad praesens.
Vos may amo:



Post tempus: Aug-30-2019



