

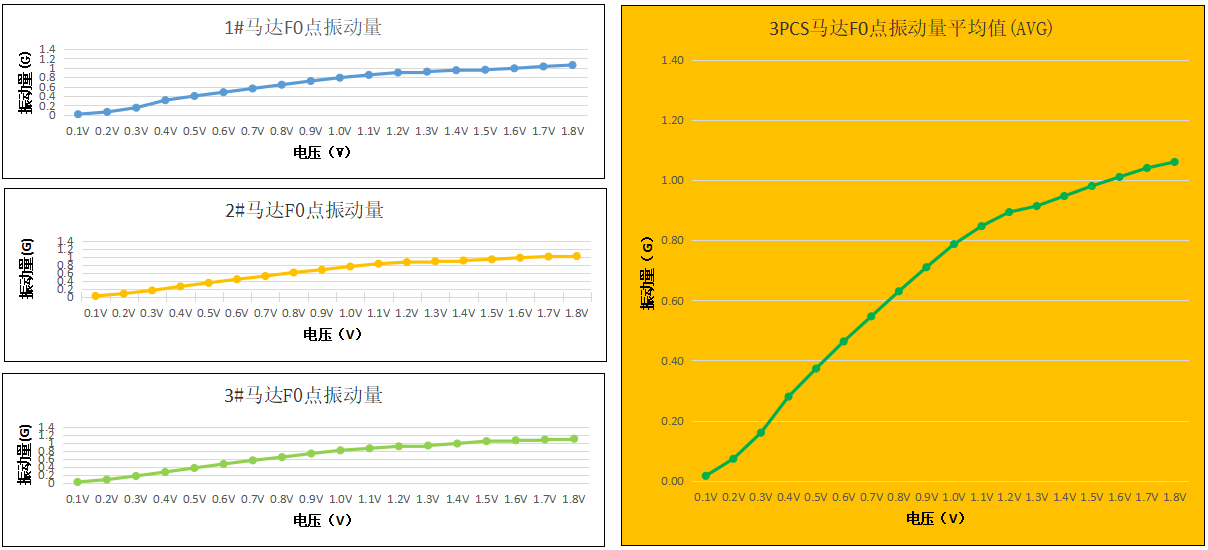
G ass eng Eenheet, déi allgemeng benotzt fir d'Amplitude vu Vibratioun ze beschreiwenVibration Motorenan linear resonant Aktuatoren. Et representéiert d'Beschleunegung wéinst der Schwéierkraaft, wat ongeféier 9,8 Meter pro Sekonn Quartier ass (m / e squ²).
Wa mir e Schwéngungsniveau vum 1G soen, heescht et, datt d'Vibration Amparituitum gläichwäertent zu der Beschleunigung vun der Beschleunitéit erliewt ginn. Dëse Verglach erlaabt eis d'Intensitéit vun der Vibration a säi potenziellen Impakt op den aktuelle System oder Uwendung ze verstoen.
Et ass wichteg ze notéieren datt g just e Wee fir d'Amplpratiounsspräiheet ausdrécken, kann et och an aner Eenheeten gemooss ginn wéi Meter pro zweet Quartier (mm / e-e-e-e-e. déi spezifesch Ufuerderunge oder Standard. Trotzdeem, benotzt g als Eenheet e klore Referenzpunkt a Versuergungsniveauen verstinn Vibration Niveauen op engem relevante Wee.
Wat ass de Grond fir net Verlazung ze benotzen (mm) oder Kraaft (n) als Moossnam vun der Schwéngung Amplitude?
Vibration Motorenginn normalerweis net eleng benotzt. Si sinn dacks a méi grouss Systemer mat Zilmassen integréiert. Fir Vibratiouns Amplitude ze moossen, montéiere mir de Motor op engem bekannte Zilmass an benotzt en Accelererometer fir d'Donnéeën ze sammelen. Dëst gëtt eis e méi kloer Schwaarze Vibration Charakteristike vum System, déi mir an enger typescher Leeschtung charakteriséieren.
D'Kraaft ausléisen vun der Schwammungsorot gëtt duerch déi folgend Equatioun bestëmmt:
$$ f = m \ mol r \ Mol \ Omega ^ {2} $$
(F) stellt d'Kraaft duer, (m) representéiert d'Mass vun der exzentrescher Mass um Motor (onofhängeg vum ganze System) duerstellt d'Exzentrizitéit vun der exzentrescher Mass, an (ωpt.
Et sollt bemierkt datt nëmmen d'Schwéngungskraaft vum Motor ignoréiert den Afloss vun der Zilmass. Zum Beispill, e méi staarken Objet erfuerdert méi grouss Kraaft fir deeselwechten Niveau vun der Beschleunegung als méi klengt Objet ze produzéieren. Also wann zwou Objeten dee selwechte Motor benotzt, gëtt dat méi schwéierem Objet fir eng vill méi klenger méi kleng Amplitude vibibréieren, obwuel d'Motor déi selwecht Kraaft produzéiert.
En aneren Aspekt vum Motor ass d'Vibration Frequenz:
$$ f = \ frac {Motor \: Speed \ :( RPM)}}} $$
D'Verdréckung verursaacht duerch Schwéngung gëtt direkt vun der Frequation vu Schwéngung betraff. An engem vibréierte Gerät, d'Kräfte stäerken sech cyclically um System. Fir all Kraaft huet sech ausgebilt, ginn et eng gläich a vis-à-vis vu Kraaft, déi eventuell annuléiert. Wann d'Frequenz vun der Schwéngung méi héich ass, ass d'Zäit tëscht der Optriede vun opposéierende Kräften erof.
Dofir huet de System manner Zäit fir ze verdrängen ier se opposéierend Kräfte annuléieren. Zousätzlech gëtt e méi héijen Objet eng méi kleng Verdréckung wéi e liichte Objet wann se déi selwecht Kraaft ënnerworf ginn. Dëst ass ähnlech wéi den Effekt virdru virdrun ursprénglech geduecht. E méi staarken Objet erfuerdert méi Kraaft fir déiselwecht Verdrängung als liicht Objet ze erreechen.
Kontaktéiert eis
Eis Equipe kann Ënnerstëtzung a Ënnerstëtzung matElektresch Vibration MotorProdukter. Mir verstinn dat Verständnis, déi uginn kënne präzizéieren, validéieren an en Enn Uwendungen kënne komplex sinn. Mir hunn dunnens eis Wësse an d'Expertise fir d'Risiken assoziéiert mat motoreschen Design oder liwweren. Kontaktéiert eis Équipe am Fall hei fir Äre Moscht -ratpratler ze diskutéieren a eng Léisung déi op Är spezif spezifesch Ufuerderung passt op. Mir sinn hei fir ze hëllefen.
Consultéiert Är Leader Experten
Mir hëllefen Iech, datt d'Auer vun der Qualitéit verhënneren, d'Qualitéit ze lauschtert an de Medikament mat Motor oder op Budget verfügbar ass.
Reiteratioun empfeelen
Postzäit: NOV-17-2023



