

ໃນໂຄງການນີ້, ພວກເຮົາຈະສະແດງວິທີການສ້າງ aມໍເຕີ້ສັ່ນວົງຈອນ.
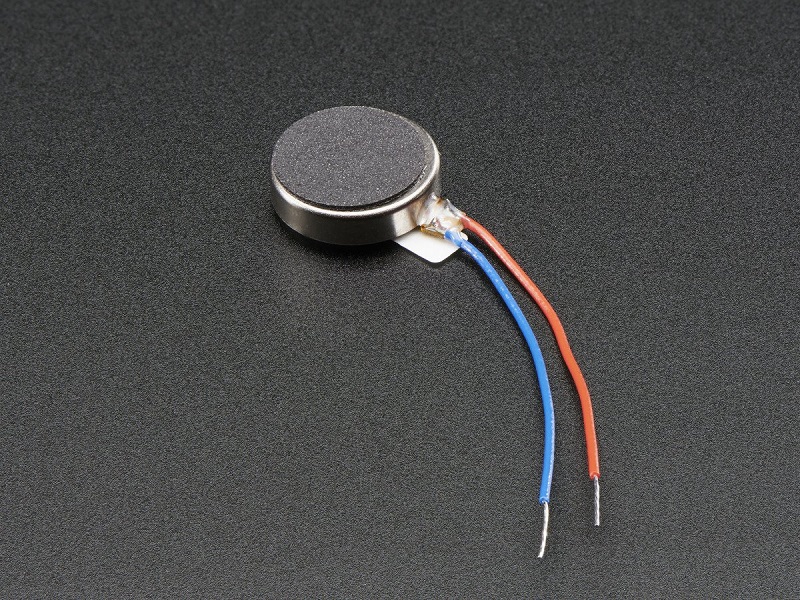
ກDC 3.0V Motor Motorແມ່ນມໍເຕີທີ່ສັ່ນສະເທືອນເມື່ອໃຫ້ພະລັງງານພຽງພໍ. ມັນແມ່ນມໍເຕີທີ່ສັ່ນສະເທືອນຢ່າງແທ້ຈິງ. ມັນດີຫຼາຍສໍາລັບວັດຖຸທີ່ສັ່ນສະເທືອນ. ມັນສາມາດຖືກນໍາໃຊ້ໃນຈໍານວນອຸປະກອນສໍາລັບຈຸດປະສົງທີ່ປະຕິບັດຫຼາຍ. ຍົກຕົວຢ່າງ, ຫນຶ່ງໃນບັນດາລາຍການທີ່ພົບເລື້ອຍທີ່ສຸດທີ່ສັ່ນສະເທືອນໂທລະສັບມືຖືທີ່ສັ່ນສະເທືອນເມື່ອຖືກຈັດໃສ່ໃນເວລາທີ່ວາງໄວ້ໃນຮູບແບບການສັ່ນສະເທືອນ. ໂທລະສັບມືຖືແມ່ນຕົວຢ່າງຂອງອຸປະກອນເອເລັກໂຕຣນິກທີ່ປະກອບດ້ວຍເຄື່ອງສັ່ນສະເທືອນ. ຕົວຢ່າງອີກຢ່າງຫນຶ່ງສາມາດເປັນຊຸດທີ່ຫຍາບຄາຍຂອງຜູ້ຄວບຄຸມເກມທີ່ສັ່ນສະເທືອນ, ຮຽນແບບການກະທໍາຂອງເກມ. ຕົວຄວບຄຸມຫນຶ່ງບ່ອນທີ່ມີຊອງທີ່ບໍ່ສາມາດໄດ້ຮັບການເພີ່ມເປັນ indendo 64, ເຊິ່ງມາພ້ອມກັບກະເປົາທີ່ຫຍາບຄາຍເພື່ອໃຫ້ຜູ້ຄວບຄຸມຈະສັ່ນສະເທືອນເພື່ອຮຽນແບບການຫຼີ້ນເກມ. ຕົວຢ່າງທີສາມສາມາດເປັນຂອງຫຼິ້ນເຊັ່ນ: Furby ທີ່ສັ່ນສະເທືອນເມື່ອຜູ້ໃຊ້ເຮັດຫນ້າທີ່ຫຼືບີບມັນຫຼືບີບມັນ, ແລະອື່ນໆ.
ດັ່ງນັ້ນDC Mini Magnet ຊົມເຊີຍວົງຈອນມໍເຕີມີໂປແກຼມທີ່ມີປະໂຫຍດຫຼາຍແລະພາກປະຕິບັດທີ່ສາມາດຮັບໃຊ້ monriad ຂອງການນໍາໃຊ້.
ເພື່ອເຮັດໃຫ້ເຄື່ອງສັ່ນສະເທືອນສັ່ນສະເທືອນແມ່ນງ່າຍດາຍຫຼາຍ. ສິ່ງທີ່ພວກເຮົາຕ້ອງເຮັດແມ່ນເພີ່ມແຮງດັນທີ່ຈໍາເປັນໄປສູ່ 2 ຫນ່ວຍ. ມໍເຕີທີ່ສັ່ນສະເທືອນມີ 2 ຫນ່ວຍປົ່ງ, ປົກກະຕິແລ້ວແມ່ນສາຍສີແດງແລະສາຍສີຟ້າ. ຂົ້ວໂລກບໍ່ສໍາຄັນສໍາລັບມໍເຕີ.
ສໍາລັບມໍເຕີທີ່ສັ່ນສະເທືອນຂອງພວກເຮົາ, ພວກເຮົາຈະນໍາໃຊ້ມໍເຕີທີ່ມີຄວາມສັ່ນສະເທືອນໂດຍ Microdrive. ມໍເຕີນີ້ມີລະດັບແຮງດັນໄຟຟ້າປະຕິບັດງານ 2.5-3.8V ທີ່ຈະຖືກຂັບເຄື່ອນ.
ສະນັ້ນຖ້າພວກເຮົາເຊື່ອມຕໍ່ 3 ໂວນຂ້າມປາຍຂອງມັນ, ມັນຈະສັ່ນສະເທືອນໄດ້ດີ, ເຊັ່ນວ່າສະແດງຢູ່ດ້ານລຸ່ມ:
ນີ້ແມ່ນສິ່ງທີ່ຈໍາເປັນທັງຫມົດເພື່ອເຮັດໃຫ້ເຄື່ອງສັ່ນສະເທືອນສັ່ນສະເທືອນ. 3 ໂວນສາມາດສະຫນອງໃຫ້ໂດຍແບດເຕີລີ່ AA 2 ຫນ່ວຍໃນຊຸດ.
ເຖິງຢ່າງໃດກໍ່ຕາມ, ພວກເຮົາຕ້ອງການທີ່ຈະໃຊ້ເວລາໃນວົງຈອນການສັ່ນສະເທືອນໃນລະດັບທີ່ກ້າວຫນ້າແລະໃຫ້ມັນຖືກຄວບຄຸມໂດຍ microcontroller ເຊັ່ນArduino.
ວິທີນີ້, ພວກເຮົາສາມາດຄວບຄຸມການເຄື່ອນໄຫວຫຼາຍຂື້ນໃນມໍເຕີສັ່ນສະເທືອນແລະສາມາດເຮັດໃຫ້ມັນສັ່ນສະເທືອນຢູ່ໃນໄລຍະຖ້າພວກເຮົາຕ້ອງການຫຼືຖ້າເຫດການໃດຫນຶ່ງເກີດຂື້ນ.
ພວກເຮົາຈະສະແດງວິທີການເຊື່ອມໂຍງກັບມໍເຕີນີ້ກັບ Arduino ເພື່ອຜະລິດແບບຄວບຄຸມແບບນີ້.
ໂດຍສະເພາະ, ໃນໂຄງການນີ້, ພວກເຮົາຈະສ້າງວົງຈອນແລະໂຄງການມັນເພື່ອວ່າບ້ານ vibrating motor12mm vibrates ທຸກໆນາທີ.
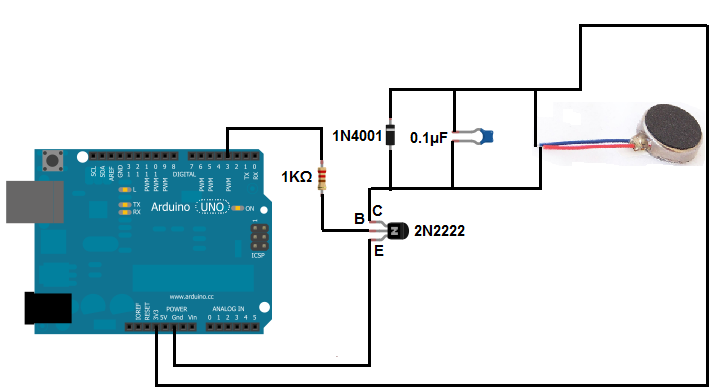
ວົງຈອນການສັ່ນສະເທືອນພວກເຮົາຈະສ້າງແມ່ນສະແດງຢູ່ຂ້າງລຸ່ມນີ້:
ແຜນວາດ Schematic ສໍາລັບວົງຈອນນີ້ແມ່ນ:
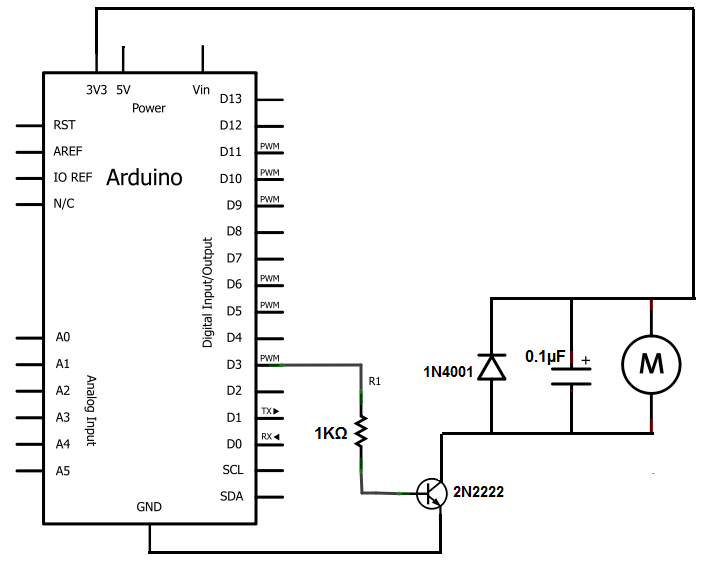
ໃນເວລາທີ່ການຂັບຂີ່ມໍເຕີດ້ວຍ microcontroller ເຊັ່ນ Arduino ທີ່ພວກເຮົາມີຢູ່ນີ້, ມັນເປັນສິ່ງສໍາຄັນທີ່ຈະເຊື່ອມຕໍ່ກັບ diode ປີ້ນກັບກັນໃນຂະຫນານກັບມໍເຕີ້. ນີ້ກໍ່ແມ່ນຄວາມຈິງໃນເວລາທີ່ຂັບລົດມັນດ້ວຍເຄື່ອງຄວບຄຸມມໍເຕີຫຼືຕົວປ່ຽນແປງ. The Diode ເຮັດຫນ້າທີ່ເປັນຜູ້ປ້ອງກັນທີ່ເພີ່ມຂື້ນຕ້ານກັບ spinks spottage ທີ່ມໍເຕີອາດຈະຜະລິດໄດ້. windings ຂອງມໍເຕີຜະລິດ spiks voltage ເປັນຢ່າງບໍ່ເປັນລະບຽບໃນຂະນະທີ່ມັນຫມຸນ. ໂດຍບໍ່ມີ diode, voltage ເຫຼົ່ານີ້ສາມາດທໍາລາຍ microController ຂອງທ່ານໄດ້ງ່າຍ, ຫຼື motor controller ic ຫຼື zap ອອກຈາກ transistor ໄດ້. ໃນເວລາທີ່ພຽງແຕ່ພະລັງງານການສັ່ນສະເທືອນໂດຍກົງກັບ voltage DC, ຫຼັງຈາກນັ້ນບໍ່ມີຄວາມຈໍາເປັນ, ແມ່ນວ່າເປັນຫຍັງວົງຈອນທີ່ພວກເຮົາມີຢູ່ຂ້າງເທິງ, ພວກເຮົາພຽງແຕ່ໃຊ້ແຫຼ່ງແຮງດັນ.
The 0.12μff capacitorite ດູດເອົາ spinks ແຮງດັນໄຟຟ້າທີ່ຜະລິດເມື່ອມີແປງ, ເຊິ່ງຕິດຕໍ່ພົວພັນກັບກະແສໄຟຟ້າໃຫ້ກັບລົມມໍເຕີ, ເປີດແລະປິດ.
ເຫດຜົນທີ່ພວກເຮົາໃຊ້ transistor (A2N2222) ແມ່ນຍ້ອນວ່າ microcontroller ສ່ວນໃຫຍ່ມີຜົນໄດ້ຮັບທີ່ຂ້ອນຂ້າງອ່ອນແອ ເພື່ອເຮັດໃຫ້ເຖິງຜົນຜະລິດທີ່ອ່ອນແອໃນປະຈຸບັນນີ້, ພວກເຮົາໃຊ້ຕົວແປເພື່ອສະຫນອງການຂະຫຍາຍປະຈຸບັນ. ນີ້ແມ່ນຈຸດປະສົງຂອງການຫັນປ່ຽນ 2N2222 ນີ້ພວກເຮົາກໍາລັງໃຊ້ຢູ່ນີ້. ມໍເຕີການສັ່ນສະເທືອນຕ້ອງການປະມານ 75MA ຂອງກະແສໄຟຟ້າທີ່ຈະຖືກຂັບເຄື່ອນ. transistor ອະນຸຍາດໃຫ້ສິ່ງນີ້ແລະພວກເຮົາສາມາດຂັບລົດໄດ້ມໍເຕີປະເພດຫຼຽນຄໍາ 327. ເພື່ອໃຫ້ແນ່ໃຈວ່າຕອນນີ້ຫຼາຍເກີນໄປບໍ່ໄດ້ໄຫຼຈາກຜົນຜະລິດຂອງ transistor, ພວກເຮົາວາງ1kωໃນຊຸດທີ່ມີສ່ວນທີ່ມີຖານຂອງຕົວປ່ຽນແປງຂອງ transistor. ສິ່ງນີ້ໄດ້ attenuates ໃນປະຈຸບັນກັບຈໍານວນທີ່ສົມເຫດສົມຜົນເພື່ອວ່າໃນປະຈຸບັນຫຼາຍເກີນໄປບໍ່ແມ່ນພະລັງງານມໍເຕີ mini mini 8mm. ຈົ່ງຈື່ໄວ້ວ່າ transistors ປົກກະຕິແລ້ວສະຫນອງການຂະຫຍາຍຂອງປະມານ 100 ເທົ່າກັບພື້ນຖານຂອງປະຈຸບັນທີ່ເຂົ້າມາ. ຖ້າພວກເຮົາບໍ່ວາງເຄື່ອງຕ້ານທານຢູ່ຖານຫຼືຢູ່ໃນຜົນຜະລິດ, ກະແສໄຟຟ້າຫຼາຍເກີນໄປສາມາດສ້າງຄວາມເສຍຫາຍໃຫ້ມໍເຕີ. ຄຸນຄ່າຂອງເຄື່ອງສ້ອມແປງ1Kωບໍ່ຊັດເຈນ. ຄຸນຄ່າໃດໆສາມາດຖືກນໍາໃຊ້ເຖິງປະມານ5kωຫຼືດັ່ງນັ້ນ.
ພວກເຮົາເຊື່ອມຕໍ່ຜົນໄດ້ຮັບທີ່ວ່າການປ່ຽນແປງຈະຂັບລົດໄປຫາຜູ້ເກັບຂອງ translistor ໄດ້. ນີ້ແມ່ນມໍເຕີພ້ອມທັງສ່ວນປະກອບທັງຫມົດທີ່ມັນຕ້ອງການໃນຂະຫນານກັບມັນເພື່ອປ້ອງກັນວົງຈອນເອເລັກໂຕຣນິກ.
ເວລາໄປສະນີ: Oct-12-2018



