

जी एक युनिट आहे ज्यामध्ये सामान्यत: कंपच्या विशालतेचे वर्णन करण्यासाठी वापरले जातेकंपन मोटर्सआणि रेखीय रेझोनंट अॅक्ट्युएटर्स. हे गुरुत्वाकर्षणामुळे प्रवेग दर्शवते, जे अंदाजे 9.8 मीटर प्रति सेकंद चौरस (एम/एस) आहे.
जेव्हा आपण 1 जी च्या कंपन पातळी म्हणतो, याचा अर्थ असा आहे की कंपन मोठेपणा गुरुत्वाकर्षणामुळे एखाद्या वस्तूच्या अनुभवाच्या प्रवेगच्या समतुल्य आहे. ही तुलना आम्हाला कंपची तीव्रता आणि सध्याच्या प्रणाली किंवा अनुप्रयोगावरील संभाव्य परिणाम समजण्यास अनुमती देते.
हे लक्षात घेणे महत्वाचे आहे की जी कंपनेचे मोठेपणा व्यक्त करण्याचा एक मार्ग आहे, हे इतर युनिट्समध्ये प्रति सेकंद स्क्वेअर (एम/एस) किंवा मिलिमीटर प्रति सेकंद स्क्वेअर (मिमी/एस) सारख्या मोजले जाऊ शकते, यावर अवलंबून विशिष्ट आवश्यकता किंवा मानक. तथापि, जी एक युनिट म्हणून वापरणे एक स्पष्ट संदर्भ बिंदू प्रदान करते आणि ग्राहकांना संबंधित मार्गाने कंपन पातळी समजण्यास मदत करते.
विस्थापन (एमएम) किंवा फोर्स (एन) न वापरण्याचे कारण म्हणजे कंपन मोठेपणाचे एक उपाय म्हणून?
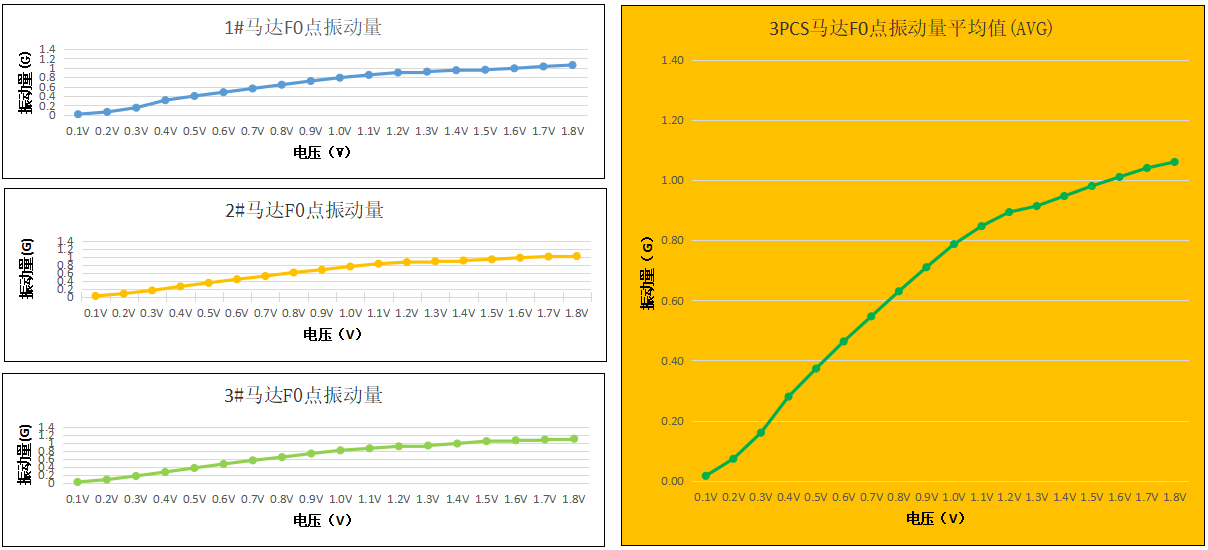
कंपन मोटर्ससामान्यत: एकट्या वापरल्या जात नाहीत. लक्ष्य जनतेसह ते बर्याचदा मोठ्या सिस्टममध्ये समाविष्ट केले जातात. कंपन मोठेपणा मोजण्यासाठी, आम्ही एका ज्ञात लक्ष्य वस्तुमानावर मोटर माउंट करतो आणि डेटा गोळा करण्यासाठी ce क्सिलरोमीटर वापरतो. हे आम्हाला सिस्टमच्या एकूण कंपन वैशिष्ट्यांचे एक स्पष्ट चित्र देते, जे आम्ही नंतर एका विशिष्ट कामगिरीच्या वैशिष्ट्यांच्या आकृतीमध्ये स्पष्ट करतो.
कंपन मोटरने वापरलेली शक्ती खालील समीकरणाद्वारे निश्चित केली जाते:
$$ एफ = एम \ वेळा आर \ वेळा \ ओमेगा \ {2} $$
(एफ) शक्तीचे प्रतिनिधित्व करते, (एम) मोटरवरील विलक्षण वस्तुमानाचे वस्तुमान प्रतिनिधित्व करते (संपूर्ण प्रणालीची पर्वा न करता), (आर) विलक्षण वस्तुमानाच्या विलक्षणपणाचे प्रतिनिधित्व करते आणि (ω) वारंवारतेचे प्रतिनिधित्व करते.
हे लक्षात घ्यावे की केवळ मोटरची कंपन शक्ती लक्ष्य वस्तुमानाच्या प्रभावाकडे दुर्लक्ष करते. उदाहरणार्थ, जड ऑब्जेक्टला लहान आणि फिकट ऑब्जेक्ट म्हणून समान पातळीवरील प्रवेग तयार करण्यासाठी अधिक शक्ती आवश्यक असते. म्हणून जर दोन ऑब्जेक्ट्स समान मोटर वापरत असतील तर, जड ऑब्जेक्ट खूपच लहान मोठेपणासाठी कंपित होईल, जरी मोटर्स समान शक्ती तयार करतात.
मोटरचा आणखी एक पैलू म्हणजे कंपन वारंवारता:
$$ एफ = \ फ्रॅक {मोटर \: वेग \ :( आरपीएम)} {60} $$
कंपमुळे उद्भवणारे विस्थापन थेट कंपच्या वारंवारतेमुळे होते. कंपन करणार्या डिव्हाइसमध्ये, शक्ती सिस्टमवर चक्रीय पद्धतीने कार्य करते. प्रत्येक शक्तीसाठी, एक समान आणि उलट शक्ती आहे जी अखेरीस रद्द करते. जेव्हा कंपची वारंवारता जास्त असते, तेव्हा विरोधी शक्तींच्या घटनेच्या दरम्यानचा वेळ कमी होतो.
म्हणूनच, विरोधक शक्ती रद्द करण्यापूर्वी सिस्टमला विस्थापित होण्यास कमी वेळ आहे. याव्यतिरिक्त, समान शक्तीच्या अधीन असताना एखाद्या जड ऑब्जेक्टमध्ये फिकट ऑब्जेक्टपेक्षा लहान विस्थापन असेल. हे पूर्वीच्या शक्तीशी संबंधित परिणामासारखेच आहे. फिकट ऑब्जेक्टसारखेच विस्थापन साध्य करण्यासाठी जड ऑब्जेक्टला अधिक शक्ती आवश्यक असते.
आमच्याशी संपर्क साधा
आमचा कार्यसंघ सहाय्य आणि सहाय्य प्रदान करू शकतोइलेक्ट्रिक कंप मोटरउत्पादने. आम्हाला समजले आहे की मोटार उत्पादने अंतर्भूत अनुप्रयोगांमध्ये समजून घेणे, निर्दिष्ट करणे, सत्यापित करणे आणि समाकलित करणे जटिल असू शकते. आमच्याकडे मोटर डिझाइन, उत्पादन आणि पुरवठ्याशी संबंधित जोखीम कमी करण्यात मदत करण्यासाठी आमच्याकडे ज्ञान आणि कौशल्य आहे. आपल्या मोटरशी संबंधित गरजा चर्चा करण्यासाठी आजच आमच्या कार्यसंघाशी संपर्क साधा आणि आपल्या विशिष्ट आवश्यकतांना अनुकूल एक तोडगा शोधा. आम्ही मदत करण्यासाठी येथे आहोत.
आपल्या नेता तज्ञांचा सल्ला घ्या
आम्ही आपल्या मायक्रो ब्रशलेस मोटरची गुणवत्ता वितरीत करण्यासाठी आणि बजेटवर आपली मायक्रो ब्रशलेस मोटर आवश्यकतेची गुणवत्ता वितरीत करण्यासाठी आणि नुकसान टाळण्यास मदत करतो.
पोस्ट वेळ: नोव्हेंबर -17-2023



