

ဆသည်တုန်ခါမှု၏လွှဲခွင်ကိုဖော်ပြရန်အသုံးပြုသောယူနစ်တစ်ခုဖြစ်သည်တုန်ခါမှု Motorsနှင့် linear ပဲ့တင်ဆပ်သူ actuators ။ ၎င်းသည်ဆွဲငင်အားကြောင့်ပိုမိုများပြားလာခြင်းကြောင့်တစ်စက္ကန့်နှစ်ထပ်ကိန်းလျှင် 9.8 မီတာရှိသည်။
1G တုန်ခါမှုအဆင့်ကိုကျွန်ုပ်တို့ပြောသောအခါတုန်ခါမှုလွှဲခွင်သည်ဆွဲငင်အားကြောင့်အရာဝတ်ထုအတွေ့အကြုံများနှင့်ညီမျှသည်ကိုဆိုလိုသည်။ ဤနှိုင်းယှဉ်ချက်ကကျွန်ုပ်တို့အားလက်ရှိစနစ်သို့မဟုတ်လျှောက်လွှာအပေါ်တုန်ခါမှုနှင့်၎င်း၏သက်ရောက်မှုများ၏ပြင်းထန်မှုကိုနားလည်ရန်ခွင့်ပြုသည်။
မှတ်သားရန်အရေးကြီးသည်မှာဆသည်တုန်ခါမှုလွှဲပြောင်းမှုကိုထုတ်ဖော်ပြောဆိုရန်နည်းလမ်းတစ်ခုမျှသာဖြစ်သည်။ ၎င်းကိုဒုတိယနှစ်ထပ်ကိန်း (MM / S²) လျှင်တစ်စက္ကန့် (MM / S²) သို့မဟုတ်မီလီမီတာ (MM / S²) ကဲ့သို့သောအခြားယူနစ်များ၌တိုင်းတာနိုင်သည် တိကျတဲ့လိုအပ်ချက်များသို့မဟုတ်စံ။ မည်သို့ပင်ဆိုစေကာ, ဆကိုယူနစ်တစ်ခုအနေဖြင့်ရှင်းရှင်းလင်းလင်းရည်ညွှန်းသည့်နေရာကိုထောက်ပံ့ပေးပြီးဖောက်သည်များကိုသက်ဆိုင်ရာလမ်းစဉ်တွင်ဖောက်သည်များကိုနားလည်ရန်ကူညီသည်။
တုန်ခါမှု (MM) သို့မဟုတ်အင်အား (n) ကိုအတိုင်းအတာတစ်ခုအထိတုန်ခါမှုလွှဲခွင်အဖြစ်မသုံးသောအကြောင်းပြချက်ကဘာလဲ။
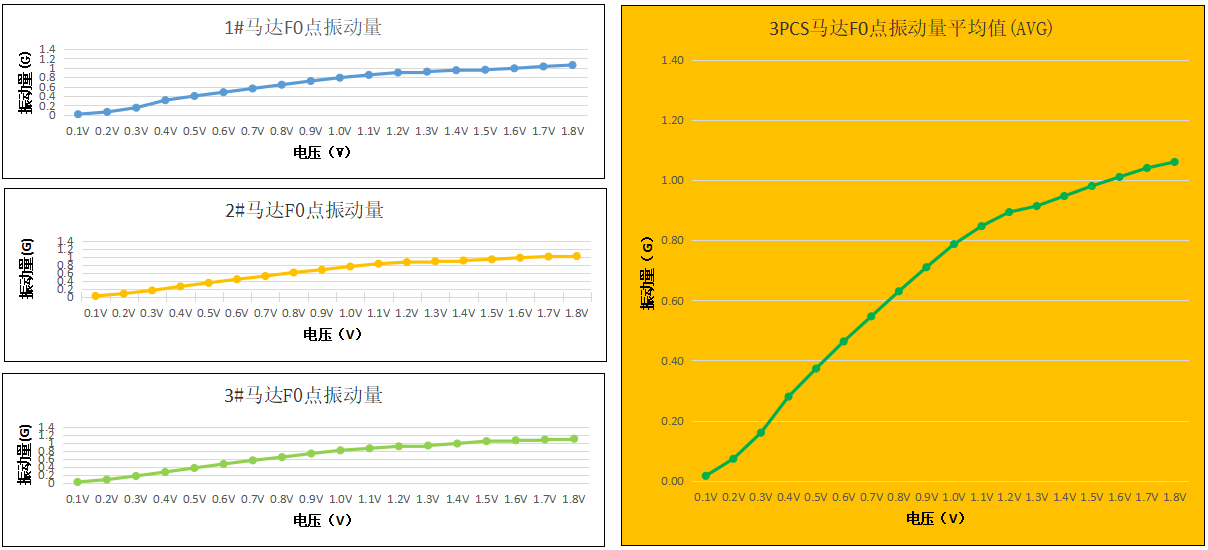
တုန်ခါမှု Motorsပုံမှန်အားဖြင့်တစ်ယောက်တည်းမသုံးပါ။ သူတို့မကြာခဏပစ်မှတ်ထုနှင့်အတူပိုကြီးတဲ့စနစ်များသို့ထည့်သွင်းနေကြသည်။ တုန်ခါမှုလွှဲခွင်ကိုတိုင်းတာရန်ကိုတိုင်းတာရန်မော်တာကိုလူသိများသောအစုလိုက်အပြုံလိုက်ဖြင့်တပ်ဆင်ထားပြီးအချက်အလက်များကိုစုဆောင်းရန် Accelerometer ကိုအသုံးပြုသည်။ ၎င်းသည်ကျွန်ုပ်တို့အားစနစ်၏တုန်ခါမှု၏ဝိသေသလက္ခဏာများကိုပိုမိုရှင်းလင်းစွာဖော်ပြထားသည်။ ၎င်းသည်ပုံမှန်စွမ်းဆောင်ရည်ဝိသေသလက္ခဏာများတွင်ဖော်ပြထားသည်။
တုန်ခါမှုမော်တာအားဖြင့်ကြိုးပမ်းအားထုတ်မှုကိုအောက်ပါညီမျှခြင်းဖြင့်ဆုံးဖြတ်သည်။
$$ f = m \ times r \ time ^ emoma ^ {2} $$
(စ) အင်အားကိုကိုယ်စားပြုသောစွမ်းအားကိုကိုယ်စားပြုသော (စ) သည်မော်တာ၏အစုလိုက်အပြုံလိုက်အစုလိုက်အပြုံလိုက်ကိုကိုယ်စားပြုသည် (R) သည်မော်တာ၏အစုလိုက်အပြုံလိုက်ကိုကိုယ်စားပြုသည်။
သတိပြုသင့်သည်မှာမော်တာ၏တုန်ခါမှုစွမ်းအားသည်ပစ်မှတ်အစုလိုက်အပြုံလိုက်၏သွဇာလွှမ်းမိုးမှုကိုလျစ်လျူရှုကြောင်းသတိပြုသင့်သည်။ ဥပမာအားဖြင့်ပိုလေးသောအရာဝတ်ထုတစ်ခုသည်ပိုမိုကျယ်ပြန့်သောအရာဝတ်ထုတစ်ခုအနေဖြင့်ပိုမိုမြန်ဆန်သောအဆင့်ကိုထုတ်လုပ်ရန်ပိုမိုမြန်ဆန်သောအင်အားလိုအပ်သည်။ ထို့ကြောင့်အရာဝတ်ထုနှစ်ခုသည်တူညီသောမော်တာကိုသုံးပါကပိုလေးသောအရာဝတ်ထုသည်သေးငယ်သောအရာဝတ်ထုကိုပိုမိုဆိုးရှားလာလိမ့်မည်။
မော်တာ၏နောက်ထပ်ရှုထောင့်သည်တုန်ခါမှုအကြိမ်ရေဖြစ်သည်။
$$ f = \ frac {Motor \: အမြန်နှုန်း :( RPM) {60} $$
တုန်ခါမှုကြောင့်တုန်ခါမှုကြောင့်ဖြစ်ပေါ်လာသောအိုးအိမ်သည်တုန်ခါမှုနှုန်းဖြင့်တိုက်ရိုက်ထိခိုက်သည်။ တုန်ခါနေသောကိရိယာတွင်အင်အားစုများသည်စနစ်ပေါ်တွင်သိသိသာသာပြုမူသည်။ အင်အားတိုင်းအတွက်ကြိုးပမ်းမှုတိုင်းအတွက်တန်းတူညီမျှနှင့်ဆန့်ကျင်ဘက်အင်အားတစ်ခုရှိသည်။ နောက်ဆုံးတွင်၎င်းကိုဖျက်သိမ်းနိုင်သည်။ တုန်ခါမှုနှုန်းသည်ပိုမိုမြင့်မားလာသောအခါဆန့်ကျင်သောအင်အားစုများဖြစ်ပျက်မှု၏ဖြစ်ပျက်မှုသည်လျော့နည်းသွားသည်။
ထို့ကြောင့်ဆန့်ကျင်သောတပ်ဖွဲ့များမှပယ်ဖျက်ခြင်းမပြုမီစနစ်သည်အိုးအိမ်စွန့်ခွာထွက်ပြေးရန်အချိန်နည်းပါးသည်။ ထို့အပြင်ပိုမိုလေးလံသောအရာဝတ်ထုတစ်ခုသည်တူညီသောအင်အားကို ကျော်လွန်. ပိုမိုပေါ့ပါးသောအရာဝတ်ထုတစ်ခုထက် ပို. သေးငယ်သောနေရာရွှေ့ပြောင်းခံရလိမ့်မည်။ ၎င်းသည်အင်အားနှင့် ပတ်သက်. အစောပိုင်းကဖော်ပြခဲ့သောအကျိုးသက်ရောက်မှုနှင့်ဆင်တူသည်။ ပိုမိုလေးသောအရာဝတ်ထုတစ်ခုသည်ပိုမိုပေါ့ပါးသောအရာဝတ်ထုတစ်ခုအဖြစ်တူညီသောနေရာရွှေ့ပြောင်းမှုကိုရရှိရန်ပိုမိုအင်အားလိုအပ်သည်။
ကြှနျုပျတို့ကိုဆကျသှယျရနျ
ကျွန်ုပ်တို့၏အဖွဲ့သည်ပံ့ပိုးမှုနှင့်အကူအညီများပေးနိုင်သည်လျှပ်စစ်တုန်ခါမှုမော်တာလျှပ်စစ်တုန်ခါမှုထုတ်ကုန်များ။ နားလည်မှု, မော်တာထုတ်ကုန်များကိုအဆုံးသတ်အသုံးချပရိုဂရမ်များသို့အပြီးသတ်ခြင်း, ကျွန်ုပ်တို့သည်မော်တော်ဒီဇိုင်း, ကုန်ထုတ်လုပ်မှုနှင့်ထောက်ပံ့ရေးနှင့်ဆက်စပ်သောအန္တရာယ်များကိုလျှော့ချရန်ကျွန်ုပ်တို့တွင်အသိပညာနှင့်ကျွမ်းကျင်မှုရှိသည်။ သင်၏မော်တာနှင့်သက်ဆိုင်သောလိုအပ်ချက်များကိုဆွေးနွေးရန်ယနေ့ကျွန်ုပ်တို့၏အသင်းကိုဆက်သွယ်ပါ။ သင်၏လိုအပ်ချက်များကိုသင့်တော်သောအဖြေတစ်ခုရှာပါ။ ငါတို့ဒီမှာကူညီဖို့ဒီမှာပါ။
သင်၏ခေါင်းဆောင်ကျွမ်းကျင်သူများနှင့်တိုင်ပင်ပါ
ကျွန်ုပ်တို့သည်အရည်အသွေးမြင့်မားမှုကိုဖြည့်ဆည်းပေးရန်နှင့်သင်၏ micro brushless Motor လိုအပ်သည်,
စာဖတ်ခြင်းကိုအကြံပြုပါသည်
အချိန် - နိုဝင်ဘာ 17-2023



