

Wprowadzić
Silniki mikro wibracyjneOdgrywają istotną rolę w różnych aplikacjach, od elektroniki użytkowej po urządzenia medyczne. Umożliwiają haptyczne informacje zwrotne, powiadomienia alarmowe i alerty oparte na wibracjach w celu zwiększenia wrażenia użytkownika. Wśród różnych rodzajów silników mikro wibracyjnych na rynku dwa najczęstsze warianty toERM (mimośrodowa masa obrotowa) silniki wibracyjnei LRA (liniowy siłownik rezonansowy) silniki wibracji. Ten artykuł ma na celu wyjaśnienie różnic między silnikami wibracji ERM i LRA, wyjaśniając ich mechaniczną strukturę, wydajność i zastosowania.
Dowiedz się o silnikach wibracji ERM
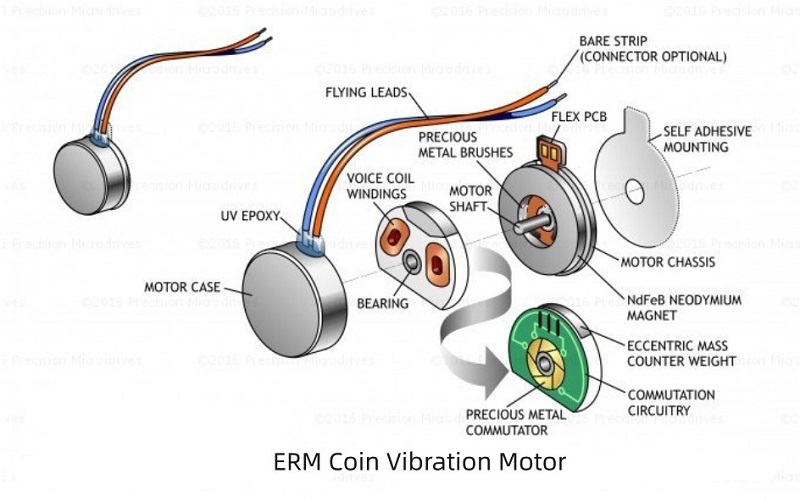
Silniki wibracji ERMsą szeroko stosowane ze względu na ich prostotę, opłacalność i szeroką kompatybilność. Silniki te składają się z mimośrodowej masy obracającej się na wale silnikowym. Gdy masa się obraca, tworzy niezrównoważoną siłę, która powoduje wibracje. Amplitudę i częstotliwość wibracji można dostosować poprzez kontrolowanie prędkości obrotu. Silniki ERM są zaprojektowane do wytwarzania wibracji w szerokim zakresie częstotliwości, co czyni je odpowiednio zarówno dla delikatnych, jak i intensywnych powiadomień.
Dowiedz się o silnikach wibracji LRA
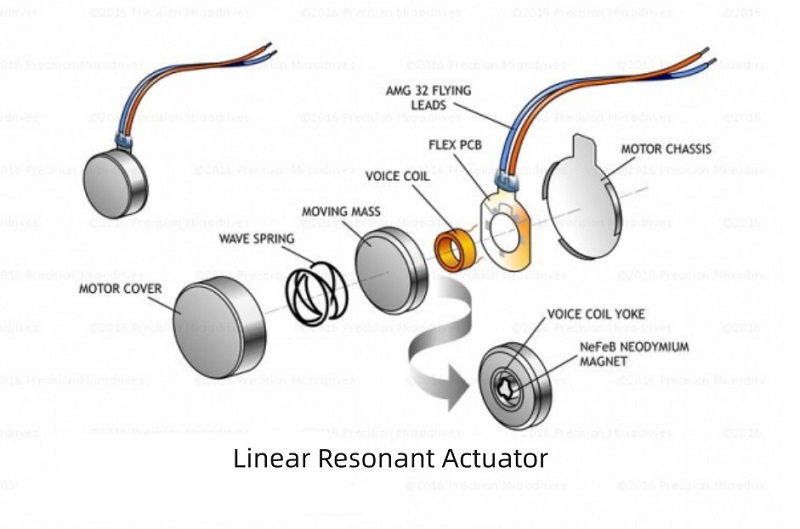
Silniki wibracyjne LRA, z drugiej strony, użyj innego mechanizmu do generowania wibracji. Składają się one z masy podłączonej do sprężyny, tworząc system rezonansowy. Po nałożeniu sygnału elektrycznego cewka silnika powoduje oscyluje masę w przód iw tył w sprężynie. Ta oscylacja powoduje wibracje przy częstotliwości rezonansowej silnika. W przeciwieństwie do silników ERM, LRAS ma ruch liniowy, co powoduje niskie zużycie energii i wysoką wydajność energetyczną.
Analiza porównawcza
1. Skuteczność i dokładność:
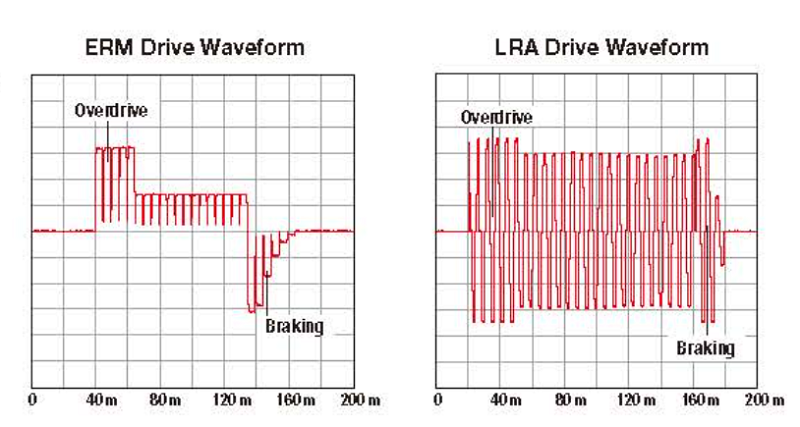
Silniki ERM zazwyczaj zużywają więcej mocy w porównaniu z LRAS ze względu na ich ruch obrotowy. LRA jest napędzana oscylacją liniową, która jest bardziej wydajna i zużywa mniejszą moc, jednocześnie dostarczając precyzyjne wibracje.
2. Kontrola i elastyczność:
Silniki ERM przodują w dostarczaniu szerszego zakresu wibracji ze względu na ich obracającą się masę mimośrodową. Są stosunkowo łatwe do kontrolowania i umożliwiają manipulowanie częstotliwością i amplituą.Niestandardowy silnik liniowyma ruch liniowy, który zapewnia lepszą kontrolę, ale tylko w określonym zakresie częstotliwości.
3. Czas reakcji i trwałość:
Silniki ERM wykazują szybsze czasy reakcji, ponieważ zapewniają wibracje natychmiast po aktywacji. Jednak ze względu na mechanizm obrotowy są one podatne na zużycie podczas długoterminowego użytkowania. LRA ma mechanizm oscylacyjny, który trwa dłużej i jest bardziej trwały w przypadku zastosowań wymagających dłuższego użycia.
4. Nieś charakterystyka wibracji:
Silniki ERM mają tendencję do wytwarzania większej ilości hałasu i przenoszenia wibracji do otaczającego środowiska. Natomiast LRA wytwarza gładsze wibracje z minimalnym hałasem, dzięki czemu nadaje się do zastosowań, które wymagają dyskretnego sprzężenia zwrotnego w dotyku.
Obszary aplikacji
Ermmałe wibracyjne silnikisą powszechnie spotykane w telefonach komórkowych, urządzeniach do noszenia i kontrolerach gier, które wymagają szerokiej gamy wibracji. Z drugiej strony LRA są często używane w urządzeniach medycznych, ekranach dotykowych i urządzeniach do noszenia wymagających precyzyjnych i subtelnych wibracji.
Podsumowując
Podsumowując, wybórSilniki wibracyjne ERM i LRAZależy od konkretnych wymagań dotyczących aplikacji. Silniki ERM oferują szerszy zakres wibracji kosztem zużycia energii, podczas gdy LRA zapewniają bardziej precyzyjne wibracje i większą wydajność energetyczną. Zrozumienie tych różnic może pomóc projektantom, inżynierom i programistom w podejmowaniu świadomych decyzji przy wyborze silników mikro wibracyjnych do ich odpowiednich zastosowań. Ostatecznie wybór między silnikami ERM i LRA powinien opierać się na takich czynnikach, jak wydajność energetyczna, elastyczność kontroli, wymagana dokładność, trwałość i względy hałasu.
Skonsultuj się z ekspertami
Pomagamy uniknąć pułapek, aby zapewnić jakość i cenić potrzebę silnika bezszczotkowego, na czas i na budżet.
Czas po: 24 listopada 201023



