

DC бесщеточный моторКонструкция структуры очень разумно, из его использования мы можем четко почувствовать его использование, преимущества разумной структуры просты в использовании, быстрое эксплуатацию, мы можем увидеть, как высокие экономические выгоды и использование выгод разумной структуры. Так что это за структура?
Во -первых, взгляните на его структуру:
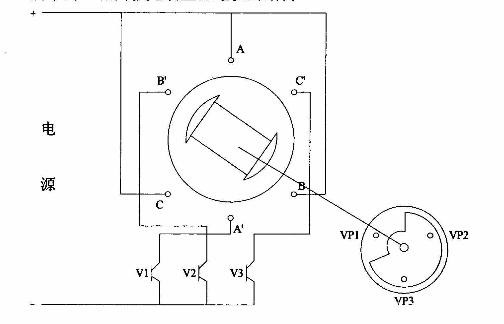
1. A, B и C являются трехфазными обмотками статора, которые соответственно соединены с устройствами Power Switch V1, V2 и V3 в цепи электронного переключателя. Ротор отслеживания датчика положения помещается на ротор двигателя. VP1, VP2 и VP3 равномерно распределены на одном конце бесщеточного двигателя постоянного тока с разницей в 120 градусов. Согласно определенному фотоэлектрическому устройству, они облучаются светом или не через функцию вращающегося затвора на вращающемся валу двигателя.
2, Обмотка статора общего электрического, электрического тока и главного магнитного поля, полученного постоянными магнитами на роторе, в результате взаимодействия между электромагнитным крутящим моментом и вращением ротора, положение магнитной стали ротора с датчиком положения в электрические сигналы,, и затем управляйте цепью электронного переключателя, так что каждая фазовая обмотка статора, в свою очередь, будет проводиться, фазовый ток статора вместе с изменением положения ротора в определенном порядке Коммутация. Последовательность проводимости цепи электронного переключателя может быть синхронизирована с углом вращения ротора для достижения механического повторного эффекта.
Поскольку бесщеточная структура двигателя постоянного тока настроена разумно, поэтому очень хорошо использовать в процессе работы двигателя, в дополнение к пониманию ее структуры, мы также должны сделать, чтобы сделать его повторный эффект более идеальным, и это в основном построен на основе разумной структуры.

Пост времени: 28-2020 марта



