

Motor bez kefyKonštrukcia štruktúry je veľmi rozumná, od jeho použitia môžeme jasne pociťovať jeho použitie, výhody primeranej štruktúry sa ľahko používajú a rýchlo prevádzkujú, vidíme, ako vysoké ekonomické prínosy a výhody využívajú primeranú štruktúru. Aká je jej štruktúra?
Najprv sa pozrite na jej štruktúru:
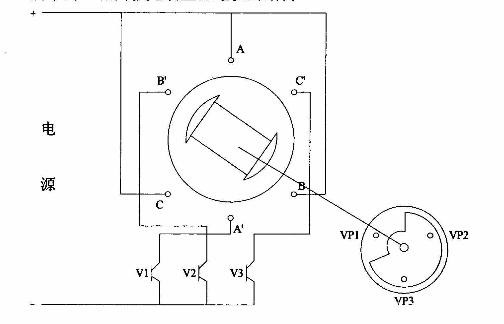
1. A, B a C sú trojfázové vinutia statora, ktoré sú spojené so zariadeniami napájacích spínačov V1, V2 a V3 v elektronickom spínacom obvode. Sledovací rotor snímača polohy je umiestnený na rotor motora.VP1, VP2 a VP3 sú rovnomerne rozložené na jednom konci DC motora bez kefy s rozdielom 120 stupňov. Podľa určitého fotoelektrického zariadenia sú ožiarené svetlom alebo nie funkciou rotujúcej uzávierky na rotujúcom hriadeli motora.
2, Vinutie statora spoločného elektrického, elektrického prúdu a hlavného magnetického poľa vyrábané permanentnými magnetmi na rotore, ktoré je výsledkom interakcie medzi elektromagnetickým krútiacim momentom a rotáciou rotora, polohou rotora magnetového ocele s polohovým snímačom do elektrických signálov, a potom ovládajte elektronický obvod spínača, takže každá fázová vinutie statora bude zase vedenie, fázový prúd statora spolu so zmenou polohy rotora v určitom poradí Kombutácia
Pretože je štruktúra motora bez kefy bez kefy nastavená primerane, takže je veľmi dobré používať, v procese motorickej prevádzky, okrem porozumenia jej štruktúry, musíme urobiť aj jeho reverzný účinok, a to sú, a to sú v podstate postavený na základe primeranej štruktúry.

Čas príspevku: marca-28-2020



