

มอเตอร์ DC brushlessการออกแบบโครงสร้างมีความสมเหตุสมผลมากจากการใช้งานเราสามารถรู้สึกได้อย่างชัดเจนการใช้งานประโยชน์ของโครงสร้างที่สมเหตุสมผลนั้นใช้งานง่ายการทำงานที่รวดเร็วเราสามารถดูได้ว่าผลประโยชน์ทางเศรษฐกิจและการใช้ประโยชน์โครงสร้างที่สมเหตุสมผลสูงเพียงใดโครงสร้างของมันคืออะไร?
ก่อนอื่นลองดูโครงสร้างของมัน:
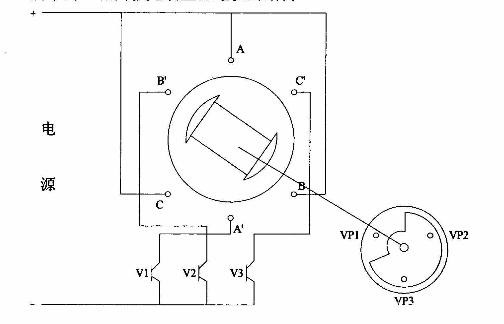
1. A, B และ C เป็นขดลวดสเตเตอร์สามเฟสซึ่งเชื่อมต่อตามลำดับกับอุปกรณ์สวิตช์ไฟ V1, V2 และ V3 ในวงจรสวิตช์อิเล็กทรอนิกส์ ใบพัดติดตามของเซ็นเซอร์ตำแหน่งจะถูกวางไว้บนโรเตอร์ของมอเตอร์ VP1, VP2 และ VP3 กระจายอย่างสม่ำเสมอที่ปลายด้านหนึ่งของมอเตอร์ DC ที่ไม่มีแปรงด้วยความแตกต่าง 120 องศา ตามอุปกรณ์โฟโตอิเล็กทริกบางตัวพวกมันจะถูกฉายรังสีด้วยแสงหรือไม่ผ่านการทำงานของชัตเตอร์หมุนบนเพลาหมุนของมอเตอร์
2, การขดลวดสเตเตอร์ของไฟฟ้าทั่วไปกระแสไฟฟ้าและสนามแม่เหล็กหลักที่ผลิตโดยแม่เหล็กถาวรบนโรเตอร์ที่เกิดจากการทำงานร่วมกันระหว่างแรงบิดแม่เหล็กไฟฟ้าและการหมุนของโรเตอร์ตำแหน่งของเหล็กแม่เหล็กโรเตอร์กับเซ็นเซอร์ตำแหน่งลงในสัญญาณไฟฟ้า จากนั้นควบคุมวงจรสวิตช์อิเล็กทรอนิกส์เพื่อให้แต่ละเฟสที่คดเคี้ยวของสเตเตอร์จะในทางกลับกันการนำกระแสเฟสสเตเตอร์พร้อมกับการเปลี่ยนแปลงตำแหน่งของโรเตอร์ในลำดับที่แน่นอน การเปลี่ยนลำดับการนำของวงจรสวิตช์อิเล็กทรอนิกส์สามารถซิงโครไนซ์กับมุมการหมุนของโรเตอร์เพื่อให้ได้เอฟเฟกต์การย้อนกลับเชิงกล
เนื่องจากโครงสร้างมอเตอร์ DC แบบไร้แปรงถูกตั้งค่าอย่างสมเหตุสมผลดังนั้นจึงเป็นการดีที่จะใช้ในกระบวนการทำงานของมอเตอร์นอกเหนือจากการทำความเข้าใจโครงสร้างของมัน โดยทั่วไปสร้างขึ้นบนพื้นฐานของโครงสร้างที่สมเหตุสมผล

เวลาโพสต์: Mar-28-2020



