

Trong dự án này, chúng tôi sẽ chỉ ra cách xây dựng mộtĐộng cơ rungMạch.
MỘTĐộng cơ rung DC 3.0Vlà một động cơ rung khi được cho đủ năng lượng. Đó là một động cơ theo nghĩa đen lắc. Nó là rất tốt cho các vật thể rung. Nó có thể được sử dụng trong một số thiết bị cho mục đích rất thực tế. Ví dụ, một trong những mục phổ biến nhất rung là điện thoại di động rung khi được gọi khi được đặt ở chế độ rung. Một điện thoại di động là một ví dụ về một thiết bị điện tử có chứa động cơ rung. Một ví dụ khác có thể là một gói ầm ầm của một bộ điều khiển trò chơi lắc, bắt chước các hành động của một trò chơi. Một bộ điều khiển trong đó một gói ầm ầm có thể được thêm vào dưới dạng phụ kiện là Nintendo 64, đi kèm với các gói Rumble để bộ điều khiển sẽ rung động để bắt chước các hành động chơi game. Một ví dụ thứ ba có thể là một món đồ chơi như Furby rung khi bạn người dùng thực hiện các hành động như chà nó hoặc siết nó, v.v.
Vì thếDC Mini Magnet rung độngMạch động cơ có các ứng dụng rất hữu ích và thiết thực có thể phục vụ vô số công dụng.
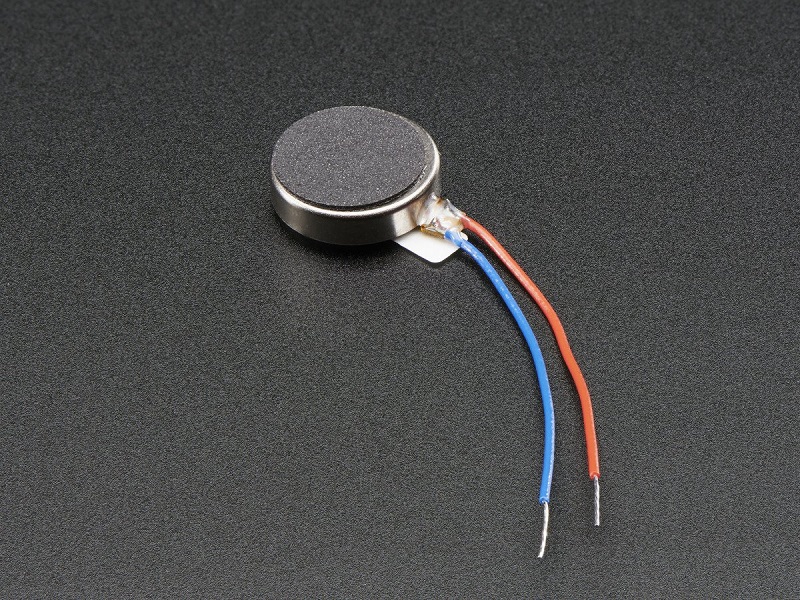
Để làm cho một động cơ rung rung rất đơn giản. Tất cả những gì chúng ta phải làm là thêm điện áp cần thiết vào 2 thiết bị đầu cuối. Một động cơ rung có 2 đầu cuối, thường là dây màu đỏ và dây màu xanh. Sự phân cực không quan trọng đối với động cơ.
Đối với động cơ rung của chúng tôi, chúng tôi sẽ sử dụng một động cơ rung bằng microdrive chính xác. Động cơ này có phạm vi điện áp hoạt động 2,5-3,8V để được cung cấp năng lượng.
Vì vậy, nếu chúng ta kết nối 3 volt trên thiết bị đầu cuối của nó, nó sẽ rung thực sự tốt, chẳng hạn như hình dưới đây:
Đây là tất cả những gì cần thiết để làm cho động cơ rung rung. 3 volt có thể được cung cấp bởi 2 pin AA trong loạt.
Tuy nhiên, chúng tôi muốn đưa mạch động cơ rung lên một mức nâng cao hơn và để nó được điều khiển bởi một bộ vi điều khiển nhưArduino.
Bằng cách này, chúng ta có thể có điều khiển động hơn đối với động cơ rung và có thể làm cho nó rung trong các khoảng thời gian đã thiết lập nếu chúng ta muốn hoặc chỉ khi một sự kiện nhất định xảy ra.
Chúng tôi sẽ chỉ ra cách tích hợp động cơ này với Arduino để tạo ra loại điều khiển này.
Cụ thể, trong dự án này, chúng tôi sẽ xây dựng mạch và lập trình đểxu động động cơ rung12 mm rung mỗi phút.
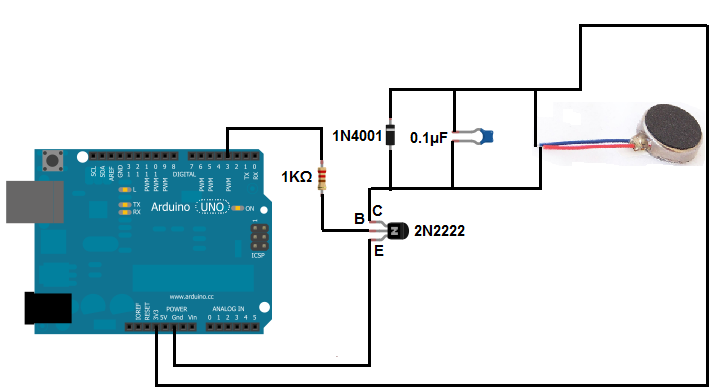
Mạch động cơ rung mà chúng tôi sẽ xây dựng được hiển thị dưới đây:
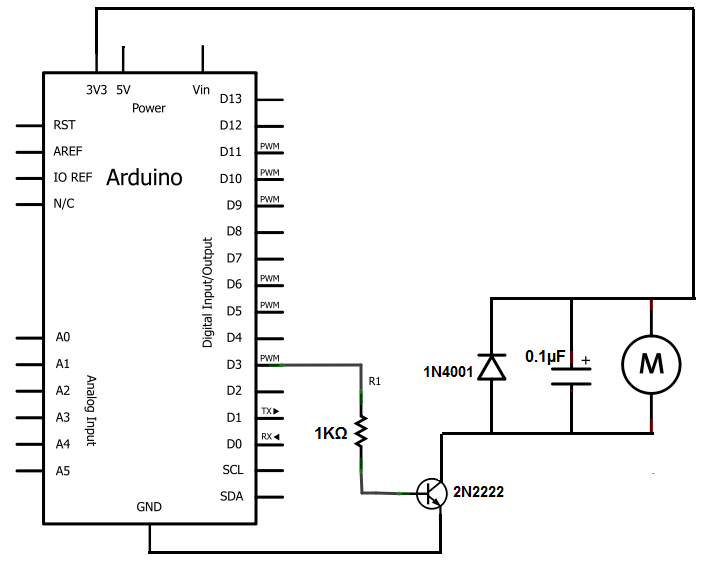
Biểu đồ cho mạch này là:
Khi lái một động cơ có bộ vi điều khiển như Arduino mà chúng ta có ở đây, điều quan trọng là kết nối một sai lệch ngược diode song song với động cơ. Điều này cũng đúng khi lái nó với bộ điều khiển động cơ hoặc bóng bán dẫn. Diode hoạt động như một bộ bảo vệ tăng đột biến chống lại các gai điện áp mà động cơ có thể tạo ra. Cuộn dây của động cơ nổi tiếng tạo ra điện áp tăng đột biến khi nó quay. Nếu không có diode, các điện áp này có thể dễ dàng phá hủy vi điều khiển của bạn hoặc IC điều khiển động cơ hoặc hạ gục một bóng bán dẫn. Khi chỉ cần cung cấp năng lượng cho động cơ rung trực tiếp với điện áp DC, thì không cần diode, đó là lý do tại sao trong mạch đơn giản là chúng ta có ở trên, chúng ta chỉ sử dụng nguồn điện áp.
Tụ điện 0,1 FILL hấp thụ các gai điện áp được tạo ra khi bàn chải, là các tiếp điểm kết nối dòng điện với cuộn dây động cơ, mở và đóng.
Lý do chúng tôi sử dụng bóng bán dẫn (2N2222) là vì hầu hết các bộ vi điều khiển có đầu ra hiện tại tương đối yếu, có nghĩa là chúng không xuất ra đủ dòng điện để điều khiển nhiều loại thiết bị điện tử khác nhau. Để bù cho đầu ra hiện tại yếu này, chúng tôi sử dụng bóng bán dẫn để cung cấp khuếch đại hiện tại. Đây là mục đích của bóng bán dẫn 2n222 này mà chúng tôi đang sử dụng ở đây. Động cơ rung cần khoảng 75mA của dòng điện để được điều khiển. Bóng bán dẫn cho phép điều này và chúng ta có thể láiĐộng cơ loại đồng xu 3V 1027. Để đảm bảo rằng quá nhiều dòng điện không chảy từ đầu ra của bóng bán dẫn, chúng tôi đặt một chuỗi 1kΩ với đế của bóng bán dẫn. Điều này làm giảm hiện tại đến một số tiền hợp lý để quá nhiều dòng điện không cung cấp năng lượng choĐộng cơ rung mini 8 mm. Hãy nhớ rằng các bóng bán dẫn thường cung cấp khoảng 100 lần khuếch đại cho dòng điện cơ sở đi qua. Nếu chúng ta không đặt một điện trở ở gốc hoặc ở đầu ra, thì quá nhiều dòng điện có thể gây hại cho động cơ. Giá trị điện trở 1kΩ không chính xác. Bất kỳ giá trị nào cũng có thể được sử dụng tối đa khoảng 5kΩ.
Chúng tôi kết nối đầu ra mà bóng bán dẫn sẽ lái đến bộ thu của bóng bán dẫn. Đây là động cơ cũng như tất cả các thành phần mà nó cần song song với nó để bảo vệ mạch điện tử.
Thời gian đăng: Tháng 10-12-2018



