

Giới thiệu
Động cơ rung động vi môĐóng một vai trò quan trọng trong một loạt các ứng dụng từ thiết bị điện tử tiêu dùng đến các thiết bị y tế. Chúng cho phép phản hồi haptic, thông báo báo động và cảnh báo dựa trên độ rung để nâng cao trải nghiệm người dùng. Trong số các loại động cơ rung động khác nhau trên thị trường, hai biến thể phổ biến nhất làĐộng cơ rung động (khối quay lập dị)và động cơ rung LRA (bộ truyền động cộng hưởng tuyến tính). Bài viết này nhằm mục đích làm rõ sự khác biệt giữa động cơ rung ERM và LRA, làm sáng tỏ cấu trúc cơ học, hiệu suất và ứng dụng của chúng.
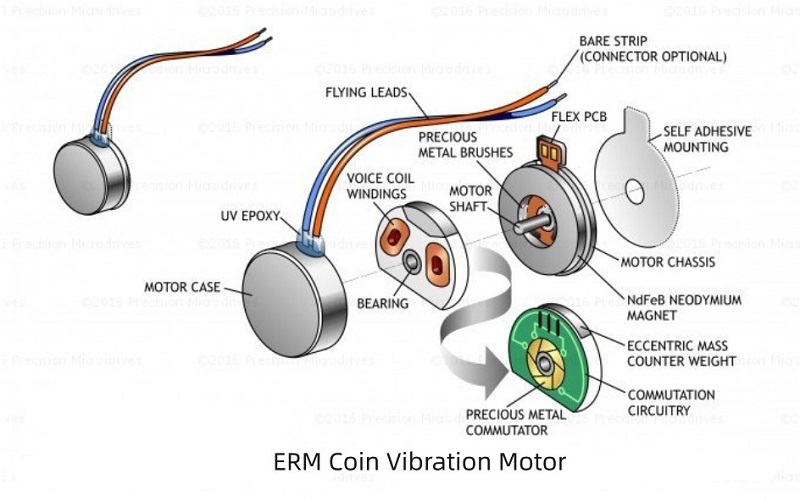
Tìm hiểu về động cơ rung ERM
Động cơ rung động ERMđược sử dụng rộng rãi do tính đơn giản, hiệu quả chi phí và khả năng tương thích rộng. Các động cơ này bao gồm một khối lập dị quay trên trục động cơ. Khi một khối lượng xoay, nó tạo ra một lực không cân bằng, gây ra rung động. Biên độ và tần số của độ rung có thể được điều chỉnh bằng cách kiểm soát tốc độ quay. ERM Motors được thiết kế để tạo ra các rung động trên một dải tần số rộng, làm cho chúng phù hợp cho cả thông báo nhẹ nhàng và dữ dội.
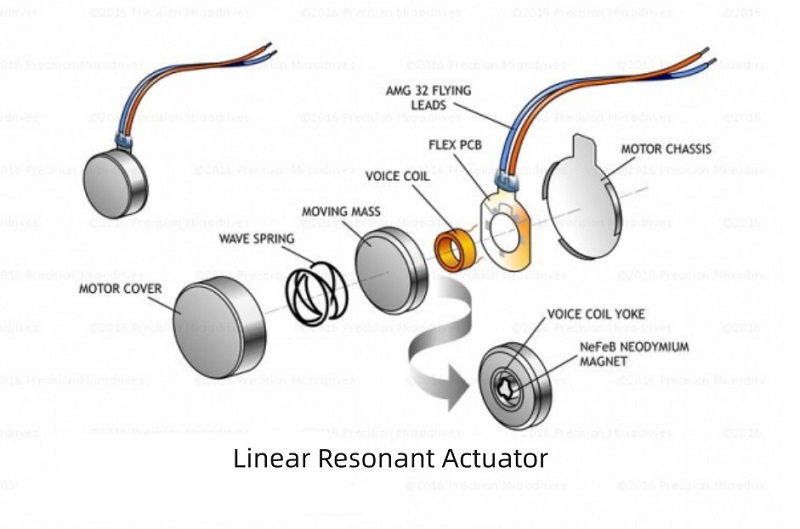
Tìm hiểu về động cơ rung LRA
Động cơ rung LRA, mặt khác, sử dụng một cơ chế khác nhau để tạo ra rung động. Chúng bao gồm một khối kết nối với một lò xo, tạo thành một hệ thống cộng hưởng. Khi một tín hiệu điện được áp dụng, cuộn dây của động cơ làm cho khối lượng dao động qua lại trong mùa xuân. Dao động này tạo ra rung động ở tần số cộng hưởng của động cơ. Không giống như động cơ ERM, LRA có chuyển động tuyến tính, dẫn đến mức tiêu thụ năng lượng thấp và hiệu quả năng lượng cao.
Phân tích so sánh
1. Hiệu quả và độ chính xác:
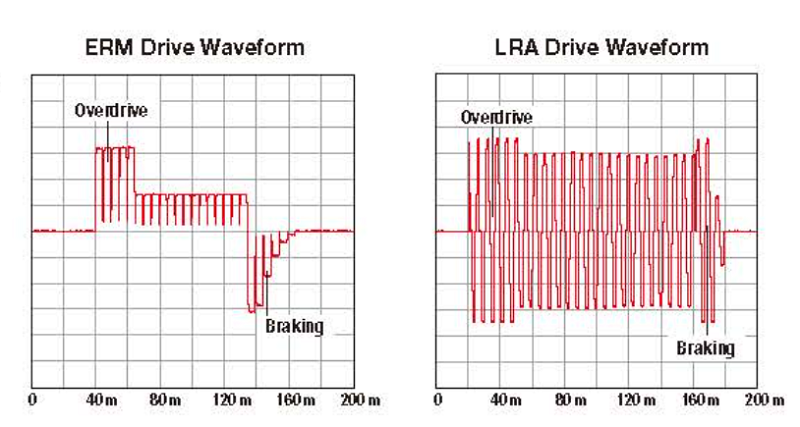
Các động cơ ERM thường tiêu thụ nhiều năng lượng hơn so với LRA do chuyển động quay của chúng. LRA được điều khiển bởi dao động tuyến tính, hiệu quả hơn và tiêu thụ ít năng lượng hơn trong khi cung cấp các rung động chính xác.
2. Kiểm soát và linh hoạt:
ERM Motors xuất sắc trong việc cung cấp một phạm vi rung động rộng hơn do khối lượng lập dị xoay vòng của chúng. Chúng tương đối dễ dàng để kiểm soát và cho phép thao tác tần số và biên độ.Động cơ tuyến tính tùy chỉnhcó chuyển động tuyến tính cung cấp điều khiển tốt hơn, nhưng chỉ trong một dải tần số cụ thể.
3. Thời gian phản hồi và độ bền:
ERM Motors thể hiện thời gian phản hồi nhanh hơn vì chúng cung cấp độ rung ngay khi kích hoạt. Tuy nhiên, do cơ chế quay, chúng có xu hướng hao mòn trong khi sử dụng lâu dài. LRA có một cơ chế dao động kéo dài hơn và bền hơn cho các ứng dụng yêu cầu sử dụng mở rộng.
4. Đặc điểm và độ rung đặc trưng:
ERM Motors có xu hướng tạo ra nhiều tiếng ồn hơn và truyền các rung động đến môi trường xung quanh. Ngược lại, LRA tạo ra các rung động mượt mà hơn với tiếng ồn tối thiểu, làm cho nó phù hợp cho các ứng dụng yêu cầu phản hồi xúc giác kín đáo.
Khu vực ứng dụng
ERMĐộng cơ rung nhỏthường được tìm thấy trong điện thoại di động, thiết bị đeo và bộ điều khiển trò chơi yêu cầu một loạt các rung động. LRA, mặt khác, thường được sử dụng trong các thiết bị y tế, màn hình cảm ứng và thiết bị đeo đòi hỏi các rung động chính xác và tinh tế.
Kết luận
Tóm lại, sự lựa chọn củaĐộng cơ rung erm và LRAPhụ thuộc vào các yêu cầu ứng dụng cụ thể. ERM Motors cung cấp phạm vi rung rộng hơn với chi phí tiêu thụ điện năng, trong khi LRA cung cấp độ rung chính xác hơn và hiệu quả năng lượng lớn hơn. Hiểu những khác biệt này có thể giúp các nhà thiết kế, kỹ sư và nhà phát triển đưa ra quyết định sáng suốt khi chọn động cơ rung vi mô cho các ứng dụng tương ứng của họ. Cuối cùng, sự lựa chọn giữa động cơ ERM và LRA nên dựa trên các yếu tố như hiệu quả năng lượng, tính linh hoạt kiểm soát, độ chính xác cần thiết, độ bền và xem xét tiếng ồn.
Tham khảo ý kiến các chuyên gia lãnh đạo của bạn
Chúng tôi giúp bạn tránh những cạm bẫy để cung cấp chất lượng và coi trọng nhu cầu của động cơ không chổi than, đúng giờ và ngân sách.
Thời gian đăng: Tháng 11-24-2023



