

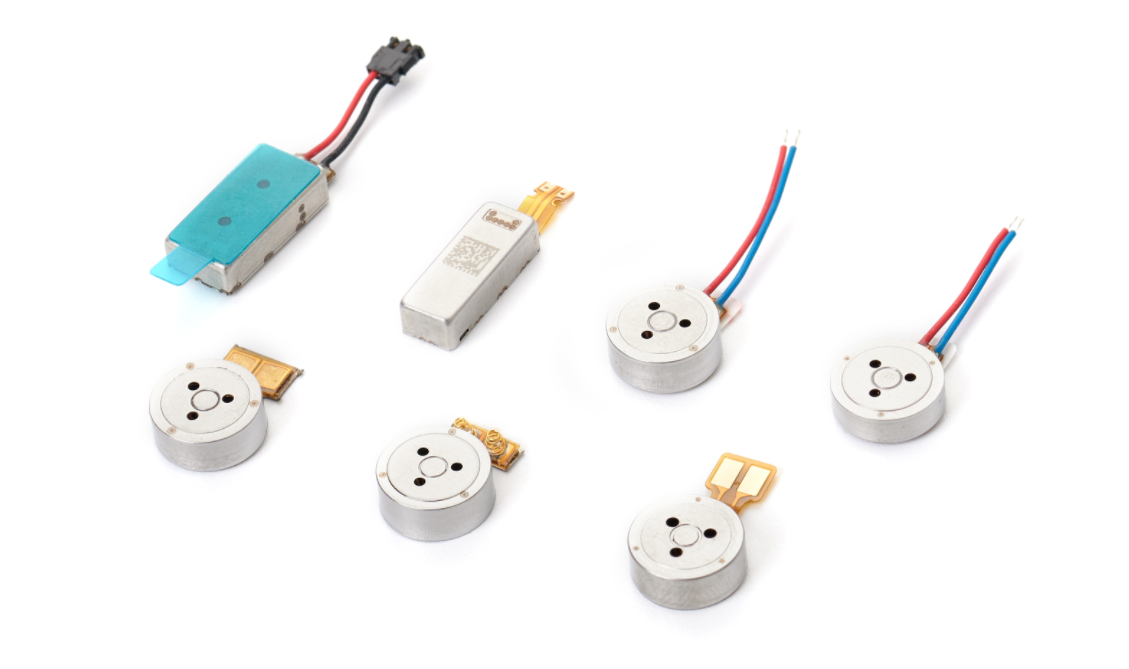
I-Wible Diators, ekwabizwa ngokuba yi-Commar Pronators (LRA). Imotorication yokuhambahamba yelayini, ekwabizwa ngokuba ngabasebenzi be-Countersure (i-LRA), i-compact, inamandla, kunye nezixhobo ezifanelekileyo ezisetyenziswa kwizixhobo ezahlukeneyo ze-elektroniki kunye nokusetyenziswa. Le matshini yenzelwe ukuvelisa ukungqinelana komgca, kubenza balungele iintlobo ezahlukeneyo ezifuna ukuguquguquka kunye nokulawulwa kwentshukumo.
UMGAQO-NKQUBO OMPILO
Imoto ye-LRAyimoto eguqukayo evelisa amandla e-oscillation kwi-axis enye. Ngokungafaniyo ne-DC Eccentric ijikeleze isithuthi esijikelezayo (i-ERM) isithuthi, i-artionar ye-Absor Prenator ixhomekeke kwi-Ac Flotage ye-AC iqhubekile i-coin yelizwi icinezelwe kwintwasahlobo.
Imeko yesicelo
Imotorication yemigca enomgca unokusetyenziswa kwizixhobo ezahlukeneyo, kubandakanya neefowuni eziphathwayo, ukulungisa, abalawuli bomdlalo, izixhobo zonyango, kunye neenkqubo zempendulo yeTactile. Zisetyenziselwa ukubonelela ngengxelo ye-haptic, izaziso ze-almm, kunye nokujongana nokuhambahamba komsebenzisi kwezi zixhobo, ngaloo ndlela kuphuculwe amava omsebenzisi kunye nokuphucula ukusebenza kwesixhobo.
Ezona mpawu:
I-Wibible Sport MotorsNika izibonelelo ezininzi ezibenza balungele izicelo ezahlukeneyo.
-Ukulungiswa, banengqungquthela kwaye balula, bebenza balula ukudibanisa izixhobo eziphathwayo.
-Ukuhlala, basebenzisa amandla amancinci, ngaloo ndlela bencedisa ekupheliseni ubomi bebhetri kwizixhobo ezinebhetri.
-Ulawulo oluchanekileyo lwendlela yokuphinda-phinda kunye ne-Amlplibezity ivumela ukuzaliswa kunye nokusebenza kwengxelo ye-haptic.
I-cotors yokuhamba ngemigca entambo ivelisa i-cultions kunye noluhlu olulinganiselweyo lwentshukumo, ukunciphisa umngcipheko womonakalo kwizinto ezibuthathaka.
Umahluko phakathi kwe-LRA kunye ne-ERM Mors
Xa kuthelekiswa ne-ERM (i-eccentric ijikeleze iMotors), i-LRAS ineempawu ezahlukeneyo. I-LRAS ivelisa i-vicketion viberations kwisikhokelo somgca, ngelixa ii-ERMs zenza i-vibes ngokujikeleza ubunzima be-eccentric. Umahluko osisiseko uchaphazela uhlobo lwengxelo ye-haptic ebonelela. I-LRAS idla ngokuvelisa i-nuedd kwaye iguqula i-viketions, ivumela ukuba kulawulwe ngokupheleleyo kwizicelo ezinje nge-toscycreens okanye izixhobo zokwenyani. Kwelinye icala, ii-ERMs zivelisa ii-cultions ezinamandla, zenza ukuba zilungele izicelo ezifuna impendulo ebizelwe ngaphezulu, njengabathengisi okanye ii-alamu.
Nangona kunjalo,I-LRAMS inamaxesha amade obomi obunemijikelezo engaphezu kwe-1 yezigidi.
Ukuqukumbela, iMotor yoMgca wokuDibanisa, okanye i-Wibloators Pronators, ukubonelela ngeenxa zonke ezilawulayo okanye ingxelo ye-haptic kwindawo oluluhlu. Ubungakanani bazo becwecwe, ukusetyenziswa kwamandla okuphantsi, kunye nezinto ezibonakalayo zibenza bafuneke kakhulu - emva kwezicelo zombane nabathengi, umdlalo, ukuzonwabisa, kunye nonxibelelwano lwe-haptic. Ukuba unomdla kule moto ye-LRA, pls uqhagamsheloI-Cotors MotorsUmboneleli!
Nxibelelana neengcali zakho zeNkokeli
Sinceda ukuphepha imigibe yokuhambisa umgangatho kwaye uxabise iimfuno zakho zemoto incinci incinci, ngexesha nakwixesha kunye nohlahlo-lwabiwo mali.
Ixesha leposi: I-11 ukuya kwi-11 ukuya ku-4024



