

חקר המדע העומד מאחורי מנועי משוב ומנועי רטט של האפטיק
מנוע רטט מיקרו, הידוע גם בשםמנועי משוב מישושו זה ממלא תפקיד חיוני במתן משוב מישוש למשתמשים במכשירים אלקטרוניים שונים. מנועים אלה מגיעים בצורות רבות, כולל מסות מסתובבות אקסצנטריות (ERM) ומפעילים תהודה ליניארית (LRA). בעת הבנת הביצועים של מנועים אלה, יש לקחת בחשבון גורמים כמו כוחות רטט, תאוצה ועקירה. שאלה בסיסית שעולה לעתים קרובות היא כיצד העקירה של מנוע רטט מיקרו קשורה לתדר שלו.
כדי להבין את הקשר בין תזוזה לתדר.
תחילה יש להגדיר תנאים אלה. העקירה מתייחסת למרחק שהאלמנט הרוטט של המנוע נע ממיקום המנוחה שלו. עֲבוּרERMS ו- LRAs, תנועה זו מיוצרת בדרך כלל על ידי תנודה של מסה אקסצנטרית או סליל המחובר למעיין. התדר, לעומת זאת, מייצג את מספר התנודות או המחזורים המלאים שמנוע יכול לייצר ביחידת זמן נתונה, והוא נמדד בדרך כלל בהרץ (Hz).
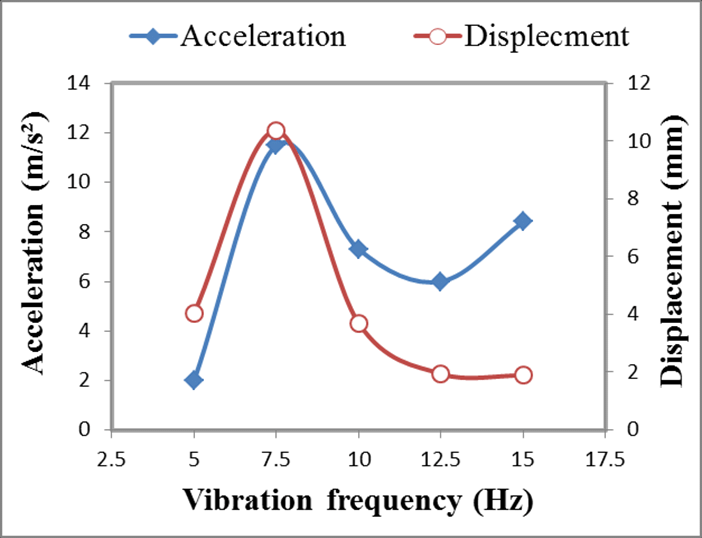
באופן כללי, העקירה של מנוע רטט היא פרופורציונלית לתדירותו. המשמעות היא שככל שתדירות המנוע עולה, העקירה עולה גם היא, וכתוצאה מכך טווח תנועה גדול יותר עבור האלמנט הרוטט.
מספר גורמים משפיעים על יחסי תדר העקירה של מנועי רטט מיקרו.
העיצוב והבנייה של המנוע, כולל גודל ומשקלו של האלמנט הרוטט, ו (עבור LRA) חוזק השדה המגנטי, ממלאים תפקיד חשוב בקביעת העקירה בתדרים שונים. בנוסף, אותות מתח הכניסה וכונן המופעלים על המנוע משפיעים על מאפייני העקירה שלו.
ראוי לציין שלמרות שעקירה של אמנוע רטט מטבע 7 מ"מקשור לתדירותו, גורמים אחרים כמו כוח הרטט הכולל ותאוצה משפיעים גם על ביצועי המנוע. כוח הרטט נמדד ביחידות כוח משיכה ומשקף את חוזק או חוזק התנודות המיוצר על ידי המנוע. האצה, לעומת זאת, מייצגת את קצב השינוי של מהירות האלמנט הרוטט. פרמטרים אלה משמשים בשילוב עם עקירה ותדירות כדי לספק הבנה מלאה של התנהגות המנוע.
לסיכום
הקשר בין העקירה לתדירות של אמנוע רטט מיקרוהוא היבט חשוב בפונקציונליות שלה. על ידי הבנת קשר זה וחשבונאות לגורמים אחרים כמו כוחות רטט ותאוצה, מהנדסים ומעצבים יכולים ליצור מערכות משוב מישוש יעילות יותר במכשירים אלקטרוניים. ככל שהטכנולוגיה ממשיכה להתקדם, המחקר של דינמיקה מוטורית של הרטט ימלא תפקיד חיוני בשיפור חוויית המשתמש ביישומים שונים.
התייעץ עם מומחי המנהיג שלך
אנו עוזרים לך להימנע מהמלכודות בכדי לספק את האיכות והעריכה של הצורך המנוע ללא מברשות שלך, בזמן ובתקציב.
זמן הודעה: ינואר 27-2024



