

RDC Motor Works ကို brush ဘယ်လို
ဘယ်လိုပိုကောင်းတဲ့နားလည်မှုသည်Brushless Motorsအလုပ်, DC Motor Works သည်တစ်ချိန်တည်းတွင်ပြုလုပ်သောကြောင့် DC Motor မည်သို့အလုပ်လုပ်သည်ကိုသတိရရမည်။
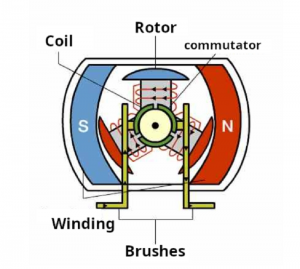
ပုံမှန်၌တည်၏DC မော်တာအပြင်ဘက်တွင်အပြင်ဘက်တွင်အမြဲတမ်းသံလိုက်များနှင့်အတွင်းပိုင်းတွင်လှည့်ပတ်နေသော armata များရှိသည်။ အမြဲတမ်းသံလိုက်သည်စာရေးကိရိယာများဖြစ်သဖြင့်၎င်းတို့အား stator ဟုခေါ်သည်။ အဆိုပါ armature လှည့်, ဒါကြောင့်ရဟတ်လို့ခေါ်တယ်။ အဆိုပါ armate တွင်လျှပ်စစ်သံလိုက်ပါရှိသည်။ ဤ electromagnet သို့လျှပ်စစ်ဓာတ်အားဖြန့်တင်းသောအခါ၎င်းသည် stator ရှိသံလိုက်များကိုဆွဲဆောင်။ ဆွဲဆောင်သောသံလိုက်စက်ကွင်းတစ်ခုဖန်တီးပေးသည်။ အသွားအပြန်နှင့်စုတ်တံများသည်အခြားမော်တာအမျိုးအစားများမှ DC brush motor ကိုခွဲခြားသည့်အဓိကအစိတ်အပိုင်းများဖြစ်သည်။
Brushless DC Motor ဆိုတာဘာလဲ။
တစ် ဦး က brushless dc မော်တာသို့မဟုတ်ကေြဗရှာCerancal DC Motors နှင့်တူသောမည်သည့်စုတ်တံမပါဘဲမဆိုမည်သည့်စုတ်တံမပါဘဲမဆိုလျှပ်စစ်မော်တာသည်လျှပ်စစ်မော်တာတစ်ခုဖြစ်သည်။
Brushless Motors သည်ပိုမိုကောင်းမွန်သည့် DC Motors တွင်ပိုမိုလူကြိုက်များသည်။
Brushless DC Motors ဘယ်လိုအလုပ်လုပ်သလဲ။
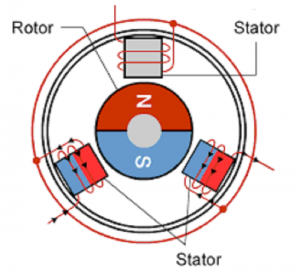
Micro Brushless Motor ၏အလုပ်လုပ်ခြင်းတွင်လှည့်ပတ်သံလိုက်သံလိုက်နှင့်တီးတီးသောကွိုင်၏အပြန်အလှန်ပါဝင်ခြင်းပါဝင်သည်။ ရိုးရာ brushed motors နှင့်မတူဘဲကာယရေးစုတ်တံများသို့မဟုတ်အသွားအပြန်များမပါ 0 င်ပါ။ Brushless Motor တွင်အမြဲတမ်းသံလိုက်များပါ 0 င်သည့် rotor သည်ကွိုင်များ, ဤရွေ့ကားကွိုင်များကိုသတ်သတ်မှတ်မှတ် Spatial Intervals တွင် stator ပတ် 0 န်းကျင်တွင်ထားရှိသည်။ မော်တာ၏အီလက်ထရောနစ်သည်အလှည့်အလှည့်သံလိုက်စက်ကွင်းတစ်ခုဖန်တီးရန်ကွိုင်တစ်ခုစီမှတစ်ဆင့်စီးဆင်းနေသောလက်ရှိစီးဆင်းမှုကိုထိန်းချုပ်သည်။ ဤလှည့်ထားသောသံလိုက်စက်ကွင်းသည်ရဟတ်တွင်အမြဲတမ်းသံလိုက်များနှင့်အပြန်အလှန်ဆက်သွယ်သည်။ အလှည့်၏လမ်းညွှန်မှုနှင့်မြန်နှုန်းကိုကွိုင်မှတဆင့်စီးဆင်းနေသောလက်ရှိအချိန်နှင့်ပမာဏကိုညှိခြင်းဖြင့်ထိန်းချုပ်နိုင်သည်။ ချောချောမွေ့မွေ့လည်ပတ်မှုအတွက်အနေအထားအာရုံခံကိရိယာများကိုထိန်းချုပ်နယ်မြေသို့တုံ့ပြန်ချက်များပေးရန် Motor သို့မကြာခဏပေါင်းစည်းလေ့ရှိသည်။ ဤတုံ့ပြန်ချက်သည် Motor Controller ကို Rotor ၏အနေအထားကိုတိကျစွာဆုံးဖြတ်ရန်နှင့်အညီအညီ current ကို arease ကိုညှိနိုင်သည်။ ယေဘုယျအားဖြင့် micro brushless Motors သည် Rotor မှအမြဲတမ်းသံလိုက်များနှင့်လှည့်ပတ်နေသောသံလိုက်များအကြားအပြန်အလှန်ဆက်သွယ်မှုကို အသုံးပြု. လည်ပတ်ခြင်း,
ကောက်ချက်
Micro Brushless Motors တွင်စွမ်းဆောင်ရည်မြင့်မားသောစွမ်းဆောင်ရည်, ရှည်လျားသောသက်တမ်း, တိကျသောထိန်းချုပ်မှုနှင့်ဆူညံသံများနှင့်နှိုင်းယှဉ်ပါရိုးရာ Motors။ ၎င်းတို့ကိုလေကြောင်းအမျိုးမျိုး, ဆေးဘက်ဆိုင်ရာပစ္စည်းကိရိယာများ, စက်ရုပ်နှင့်စားသုံးသူအီလက်ထရောနစ်အပါအ 0 င်အမျိုးမျိုးသောစက်မှုလုပ်ငန်းများတွင်ကျယ်ပြန့်စွာအသုံးပြုကြသည်။ တိကျသောမော်တာထိန်းချုပ်မှုအတွက်နည်းပညာနှင့် 0 ယ်လိုအားဆက်ရှိနေစဉ် ဆက်လက်. ဆက်လက်တိုးတက်နေသဖြင့်အနာဂတ်တွင် micro brushless Motors ကိုအသုံးပြုမည်ဟုမျှော်လင့်ရသည်။
သင်၏ခေါင်းဆောင်ကျွမ်းကျင်သူများနှင့်တိုင်ပင်ပါ
ကျွန်ုပ်တို့သည်အရည်အသွေးမြင့်မားမှုကိုဖြည့်ဆည်းပေးရန်နှင့်သင်၏ micro brushless Motor လိုအပ်သည်,
Post Time: Aug-25-2023



